mirror of
https://github.com/clockworkpi/DevTerm.git
synced 2026-06-20 16:32:20 +02:00
_wiki as submodule
This commit is contained in:
3
.gitmodules
vendored
Normal file
3
.gitmodules
vendored
Normal file
@@ -0,0 +1,3 @@
|
||||
[submodule "_wiki"]
|
||||
path = _wiki
|
||||
url = git@github.com:clockworkpi/DevTerm.wiki.git
|
||||
1
_wiki
Submodule
1
_wiki
Submodule
Submodule _wiki added at cf7fa6031a
@@ -1,16 +0,0 @@
|
||||
# Upgrade bootloader and firmware
|
||||
|
||||
for os image 69 and later
|
||||
|
||||
https://forum.rvspace.org/t/visionfive-2-debian-image-december-released/1097/43?page=2
|
||||
|
||||
https://github.com/starfive-tech/VisionFive2/releases/ download latest sdcard.img, dd to sd card, then hdmi or serial port wait for the system to start
|
||||
|
||||
## Flash files
|
||||
```
|
||||
flashcp -v u-boot-spl.bin.normal.out /dev/mtd0
|
||||
flashcp -v visionfive2_fw_payload.img /dev/mtd1
|
||||
```
|
||||
|
||||
## 7110 full os large mirror address
|
||||
https://debian.starfivetech.com/
|
||||
@@ -1,59 +0,0 @@
|
||||
# System
|
||||
ubuntu 22.04 gcc8.4.0
|
||||
```
|
||||
sudo apt install gcc-8 gcc-8-aarch64-linux-gnu gcc-8-arm-linux-gnueabihf
|
||||
```
|
||||
|
||||
# Download patch
|
||||
```
|
||||
git clone https://github.com/clockworkpi/DevTerm.git
|
||||
```
|
||||
|
||||
# Download kernel and patch it
|
||||
```
|
||||
git clone https://github.com/raspberrypi/linux
|
||||
cd linux
|
||||
git checkout 3a33f11c48572b9dd0fecac164b3990fc9234da8
|
||||
cp ~/DevTerm/Code/patch/cm4/cm4_kernel_0704.patch .
|
||||
git apply cm4_kernel_0704.patch
|
||||
|
||||
#Strongly recommend to use gcc 8.4.0 as the cross compiler
|
||||
KERNEL=kernel7l make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- bcm2711_defconfig
|
||||
KERNEL=kernel7l make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j1
|
||||
INSTALL_MOD_PATH=./modules make modules_install
|
||||
rm modules/lib/modules/*/build
|
||||
rm modules/lib/modules/*/source
|
||||
|
||||
mkdir output
|
||||
mkdir output/boot
|
||||
mkdir output/lib/modules -p
|
||||
mkdir output/boot/overlays
|
||||
|
||||
cp -rf modules/lib/modules/5.10.17-v7l+ output/lib/modules/
|
||||
cp arch/arm/boot/dts/overlays/*.dtbo output/boot/overlays/
|
||||
cp arch/arm/boot/dts/bcm2711-rpi-cm4.dtb output/boot/
|
||||
cp arch/arm/boot/zImage output/boot/kernel7l.img
|
||||
|
||||
```
|
||||
|
||||
output is the folder contains all kernel stuff
|
||||
|
||||
# config.txt
|
||||
```
|
||||
disable_overscan=1
|
||||
dtparam=audio=on
|
||||
[pi4]
|
||||
dtoverlay=vc4-fkms-v3d
|
||||
max_framebuffers=2
|
||||
|
||||
[all]
|
||||
dtoverlay=dwc2,dr_mode=host
|
||||
dtoverlay=vc4-kms-v3d-pi4,cma-384
|
||||
dtoverlay=devterm-pmu
|
||||
dtoverlay=devterm-panel
|
||||
dtoverlay=devterm-misc
|
||||
dtoverlay=audremap,pins_12_13
|
||||
|
||||
dtparam=spi=on
|
||||
gpio=10=ip,np
|
||||
```
|
||||
@@ -1,15 +0,0 @@
|
||||
# a06 a04
|
||||
```
|
||||
git clone https://github.com/clockworkpi/DevTerm.git
|
||||
sudo systemctl stop devterm-socat devterm-printer
|
||||
|
||||
sudo apt remove devterm-wiringpi-cpi
|
||||
|
||||
cd DevTerm/Code/devterm_wiringpi_cpi/
|
||||
|
||||
sudo ./build
|
||||
cd ~/DevTerm/Code/thermal_printer/
|
||||
sudo apt install -y libfreetype-dev
|
||||
make
|
||||
|
||||
|
||||
@@ -1,53 +0,0 @@
|
||||
# Download kernel source for andriod of rpi4
|
||||
|
||||
**sync-andriod-kernel.sh**
|
||||
```
|
||||
#!/bin/bash
|
||||
|
||||
BIN_DIR=$HOME/bin
|
||||
REPO_PATH=$BIN_DIR/repo
|
||||
|
||||
if [ ! -d $BIN_DIR ]
|
||||
then
|
||||
mkdir $BIN_DIR
|
||||
add_path_env $BIN_DIR
|
||||
curl https://storage.googleapis.com/git-repo-downloads/repo > $REPO_PATH
|
||||
chmod a+x $REPO_PATH
|
||||
else
|
||||
echo "folder already exits. $BIN_DIR"
|
||||
fi
|
||||
|
||||
export PATH=$PATH:$BIN_DIR
|
||||
|
||||
cd /data/andriod-kernel
|
||||
repo init -u https://github.com/android-rpi/kernel_manifest -b arpi-5.10
|
||||
repo sync
|
||||
|
||||
|
||||
```
|
||||
|
||||
# Compile
|
||||
```
|
||||
cd /data/andriod-kernel/
|
||||
./build/build.sh
|
||||
```
|
||||
|
||||
# Replace files
|
||||
|
||||
```
|
||||
sudo losetup --show -f -P lineage-19.1-20220511-UNOFFICIAL-KonstaKANG-rpi4.img # assume /dev/loop0
|
||||
sudo mount /dev/loop0p1 /mnt/p1
|
||||
|
||||
# Copy kernel binaries to boot partition
|
||||
cp -rf /data/andriod-kernel/out/arpi-5.10/dist/Image to /mnt/p1
|
||||
cp -rf /data/andriod-kernel/out/arpi-5.10/dist/bcm2711-rpi-*.dtb /mnt/p1
|
||||
cp -rf /data/andriod-kernel/out/arpi-5.10/dist/vc4-kms-v3d-pi4.dtbo to /mnt/p1/overlays/
|
||||
|
||||
sudo umount /mnt/p1
|
||||
sudo losetup -D /dev/loop0
|
||||
|
||||
```
|
||||
|
||||
# Reference Url
|
||||
* https://github.com/android-rpi/kernel_manifest
|
||||
* https://github.com/android-rpi/device_arpi_rpi4
|
||||
@@ -1,64 +0,0 @@
|
||||
# Build bin
|
||||
|
||||
```
|
||||
git clone https://github.com/rogerclarkmelbourne/STM32duino-bootloader
|
||||
|
||||
cd STM32duino-bootloader
|
||||
|
||||
make generic-pc13
|
||||
|
||||
```
|
||||
this will produce `bootloader_only_binaries/generic_boot20_pc13.bin`
|
||||
## Convert bootloader to hex format
|
||||
using `srec_cat` to convert
|
||||
windows: http://srecord.sourceforge.net/
|
||||
linux: sudo apt install srecord
|
||||
|
||||
```
|
||||
srec_cat bootloader_only_binaries/generic_boot20_pc13.bin -Binary -offset 0x08000000 -output bootloader_only_binaries/generic_boot20_pc13.hex -Intel
|
||||
```
|
||||
|
||||
## Next is to use stm32Cube to flash the bootloader
|
||||
* Download the stm32cube programmer
|
||||
[stm32cube programmer](https://www.st.com/en/development-tools/stm32cubeprog.html)
|
||||
|
||||
* Put 1 ON in the back of keyboard
|
||||
* Connect keyboard with a usb-serial convert by fpc, in order of [IO MAP](https://github.com/clockworkpi/DevTerm/wiki/Keyboard-with-FPC-60pin-0.5mm)
|
||||
* Click connect on STM32cube programmer
|
||||
* flash it
|
||||
|
||||

|
||||

|
||||

|
||||
|
||||
|
||||
|
||||
# Flash Arudino
|
||||
## Arduino IDE
|
||||
* add stm32duino pacakage index in **Preference panel** : http://dan.drown.org/stm32duino/package_STM32duino_index.json as **Additional Boards Manager URLs:** and install STM32F1xx/GD32F1xx boards
|
||||
|
||||

|
||||
|
||||
* verbose all outputs:
|
||||

|
||||
|
||||
* Select upload method ,board type is **Generic STM32F103R series **
|
||||

|
||||
|
||||
* Set cpu mhz to 48Mhz
|
||||

|
||||
|
||||
|
||||
* Put 1 OFF in the back of keyboard
|
||||
* User arduino IDE to open [devterm_keyboard.ino](https://github.com/clockworkpi/DevTerm/blob/main/Code/devterm_keyboard/devterm_keyboard.ino)
|
||||
* flash it
|
||||

|
||||
|
||||
|
||||
# CN version
|
||||
https://shimo.im/docs/Tc8RVQWdjvXtwhYv/ 《GD32f103rgt6/CKSF103R* 与stm32duino bootloader》
|
||||
|
||||
custom keyboard:
|
||||
|
||||
https://forum.clockworkpi.com/t/keyboard-stuck-in-bootloader-mode/8830/11
|
||||
|
||||
@@ -1,57 +0,0 @@
|
||||
# Prepare
|
||||
```
|
||||
mkdir -p ~/data/andriod
|
||||
mkdir -p ~/data/github/lineage-rpi
|
||||
cd ~/data/github/lineage-rpi
|
||||
|
||||
git clone https://github.com/lineage-rpi/android_kernel_brcm_rpi -b lineage-19.1
|
||||
git clone https://github.com/lineage-rpi/proprietary_vendor_brcm -b lineage-19.1
|
||||
|
||||
cd ~/data/andriod
|
||||
|
||||
git clone https://android.googlesource.com/platform/prebuilts/gcc/linux-x86/aarch64/aarch64-linux-android-4.9 -b pie-release
|
||||
```
|
||||
# Fix firmware path
|
||||
|
||||
edit `~/data/github/lineage-rpi/android_kernel_brcm_rpi/arch/arm64/configs/lineageos_rpi4_defconfig` line 1537
|
||||
to be
|
||||
`CONFIG_EXTRA_FIRMWARE_DIR="/home/cpi/data/github/lineage-rpi/proprietary_vendor_brcm/rpi4/proprietary/vendor/firmware"`
|
||||
|
||||
# Compile
|
||||
|
||||
```
|
||||
cd ~/data/github/lineage-rpi/android_kernel_brcm_rpi
|
||||
```
|
||||
|
||||
create **m.sh** with content like:
|
||||
|
||||
```
|
||||
#!/bin/bash
|
||||
|
||||
export PATH=/home/cpi/data/andriod/aarch64-linux-android-4.9/bin:$PATH
|
||||
|
||||
ARCH=arm64 CROSS_COMPILE=aarch64-linux-androidkernel- make lineageos_rpi4_defconfig
|
||||
ARCH=arm64 CROSS_COMPILE=aarch64-linux-androidkernel- make Image dtbs -j1
|
||||
```
|
||||
|
||||
```
|
||||
chmod +x m.sh
|
||||
./m.sh # start kernel compile
|
||||
```
|
||||
|
||||
# Replace files
|
||||
copy
|
||||
* bcm2711-rpi-400.dtb
|
||||
* bcm2711-rpi-4-b.dtb
|
||||
* bcm2711-rpi-cm4.dtb
|
||||
* bcm2711-rpi-cm4s.dtb
|
||||
|
||||
|
||||
from `~/data/github/lineage-rpi/android_kernel_brcm_rpi/arch/arm64/boot/dts/broadcom/` to lineage os image boot partition
|
||||
|
||||
copy `~/data/github/lineage-rpi/android_kernel_brcm_rpi/arch/arm64/boot/Image` to to lineage os image boot partition
|
||||
|
||||
copy `~/data/github/lineage-rpi/android_kernel_brcm_rpi/arch/arm64/boot/dts/overlays/vc4-kms-v3d.dtbo` to to lineage os image boot partition/overlays
|
||||
|
||||
# Kernel config
|
||||
https://gist.github.com/cuu/92bfa28a9b6de421834e5f9f408a12a4
|
||||
@@ -1,61 +0,0 @@
|
||||
# Compile the widescreen version of Cave Story from the source code
|
||||
|
||||
### Install the necessary packages:
|
||||
|
||||
```
|
||||
sudo apt update
|
||||
|
||||
sudo apt install build-essential libpng-dev libjpeg-dev make cmake cmake-data git libsdl2-dev libsdl2-doc libsdl2-gfx-dev libsdl2-gfx-doc libsdl2-image-dev libsdl2-mixer-dev libsdl2-net-dev libsdl2-ttf-dev cmake -y -qq
|
||||
```
|
||||
|
||||
|
||||
### Compile the engine (it takes about 1 hour):
|
||||
```
|
||||
cd ~
|
||||
git clone https://github.com/nxengine/nxengine-evo
|
||||
```
|
||||
### Modified to the widescreen version:
|
||||
|
||||
`vim ~/nxengine-evo/src/graphics/Renderer.cpp`
|
||||
|
||||
|
||||
### Edit the 225 line and save and exit the following line
|
||||
```
|
||||
{(char *)"1280x480", 1280, 480, 640, 240, 2, true, true},
|
||||
```
|
||||
|
||||
```
|
||||
cd nxengine-evo
|
||||
mkdir build
|
||||
cd build
|
||||
cmake -DCMAKE_BUILD_TYPE=Release ..
|
||||
make
|
||||
cd ~/nxengine-evo
|
||||
wget https://www.cavestory.org/downloads/cavestoryen.zip
|
||||
unzip cavestoryen.zip
|
||||
cp -r CaveStory/data/* data/
|
||||
cp CaveStory/Doukutsu.exe .
|
||||
./build/nxextract
|
||||
cd build
|
||||
sudo make install
|
||||
```
|
||||
|
||||
### Confirm that the original version can run normally:
|
||||
`./nxengine-evo`
|
||||
|
||||
|
||||
|
||||
|
||||
### Run the modified version:
|
||||
`./nxengine-evo`
|
||||
|
||||
### After running, press the Esc key, enter Options->Graphics, select the resolution as 1280x480, and open the full screen.
|
||||
|
||||
|
||||
### Reinstall after confirming that there is no problem:
|
||||
```
|
||||
cd ~/nxengine-evo/build
|
||||
sudo make install
|
||||
```
|
||||
|
||||
You can use the command **nxengine-evo **to run the game in any directory
|
||||
@@ -1,233 +0,0 @@
|
||||
**This wiki maybe outdated since armbian build system is always updating , so don't panic**
|
||||
|
||||
|
||||
|
||||
# Generate the prototype os image
|
||||
```
|
||||
cd ~
|
||||
git clone https://github.com/armbian/build.git
|
||||
git clone https://github.com/clockworkpi/DevTerm.git
|
||||
|
||||
cd build
|
||||
|
||||
git reset --hard 5fa022603c0948cc59688ba782b3711f980a0be3
|
||||
|
||||
cp -rf ~/DevTerm/Code/patch/armbian_build_a04/userpatches/* userpatches/
|
||||
cp -rf ~/DevTerm/Code/patch/armbian_build_a04/config/boards/* config/boards/
|
||||
cp -rf ~/DevTerm/Code/patch/armbian_build_a04/config/kernel/* config/kernel/
|
||||
|
||||
#Then exec ./compile.sh under armbian build
|
||||
cd ~/build && ./compile.sh
|
||||
```
|
||||
after image done
|
||||
uncompress the
|
||||
`linux-dtb-current-sunxi64_21.11.0-trunk_arm64.deb`
|
||||
`linux-image-current-sunxi64_21.11.0-trunk_arm64.deb`
|
||||
|
||||
and then combine all files ,all the postinst, preinst,prerm,postrm
|
||||
to be one `devterm-kernel-current-cpi-a04.deb`
|
||||
the reason is if not doing this , `apt-get upgrade` will replace the linux-dto,linux-image* in future, which will cause boot failed
|
||||
so to keep a04 linux kernel in safe , I made devterm-kernel-current-cpi-a04
|
||||
|
||||
# Prepare to chroot into the image
|
||||
```
|
||||
sudo apt install -y qemu-user-static
|
||||
sudo losetup -f # find the avaiable loop device number,eg:loop11
|
||||
sudo losetup -P /dev/loop11 ~/build/output/images/Armbian_21.11.0-trunk_Clockworkpi-a04_hirsute_current_5.10.75_xfce_desktop.img
|
||||
sudo mount /dev/loop11p1 /mnt/p1/
|
||||
|
||||
cd /mnt/p1
|
||||
|
||||
sudo mount --bind /dev dev/
|
||||
sudo mount --bind /sys sys/
|
||||
sudo mount --bind /proc proc/
|
||||
sudo mount --bind /dev/pts dev/pts
|
||||
|
||||
sudo chroot .
|
||||
```
|
||||
## Inside chroot
|
||||
(inside)
|
||||
### import clockworpi apt
|
||||
```
|
||||
curl https://raw.githubusercontent.com/clockworkpi/apt/main/debian/KEY.gpg | tee /etc/apt/trusted.gpg.d/clockworkpi.asc
|
||||
echo "deb https://raw.githubusercontent.com/clockworkpi/apt/main/debian/ stable main" | tee /etc/apt/sources.list.d/clockworkpi.list
|
||||
```
|
||||
|
||||
### Preset cpi username and password
|
||||
```
|
||||
sh /etc/profile.d/armbian-check-first-login.sh
|
||||
```
|
||||
### Install kernel
|
||||
```
|
||||
sudo apt update
|
||||
sudo apt install -y devterm-kernel-current-cpi-a04
|
||||
apt install -y xfce4-power-manager
|
||||
touch /home/cpi/.first_start
|
||||
chown cpi:cpi /home/cpi/.first_start
|
||||
```
|
||||
|
||||
### Allow sudo cpi without password prompt
|
||||
|
||||
```
|
||||
echo -e "cpi\tALL=(ALL:ALL) NOPASSWD:ALL" | sudo tee /etc/sudoers.d/cpi
|
||||
|
||||
```
|
||||
### Config xrandr
|
||||
```
|
||||
sudo bash -c 'cat << EOF > /etc/X11/Xsession.d/100custom_xrandr
|
||||
xrandr --output DSI-1 --rotate right
|
||||
xrandr --output None-1 --rotate right
|
||||
EOF'
|
||||
```
|
||||
|
||||
### Config lightdm
|
||||
#### autologin
|
||||
|
||||
```
|
||||
sudo bash -c 'cat <<EOF > /etc/lightdm/lightdm.conf.d/12-autologin.conf
|
||||
[Seat:*]
|
||||
autologin-user=cpi
|
||||
autologin-user-timeout=0
|
||||
EOF'
|
||||
```
|
||||
|
||||
```
|
||||
sudo bash -c 'cat <<EOF > /etc/lightdm/lightdm.conf.d/13-rotate-dsi.conf
|
||||
[Seat:*]
|
||||
greeter-setup-script=/etc/lightdm/setup.sh
|
||||
EOF'
|
||||
```
|
||||
```
|
||||
sudo bash -c 'cat <<EOF >/etc/lightdm/setup.sh
|
||||
#!/bin/bash
|
||||
xrandr --output DSI-1 --rotate right
|
||||
xrandr --output None-1 --rotate right
|
||||
exit 0
|
||||
EOF'
|
||||
|
||||
sudo chmod +x /etc/lightdm/setup.sh
|
||||
```
|
||||
|
||||
#### config lightdm background
|
||||
```
|
||||
sudo sed -i '/background/c\background = #202020' /etc/lightdm/slick-greeter.conf
|
||||
|
||||
```
|
||||
|
||||
### Disable app crash report dialog
|
||||
```
|
||||
sudo sed -i '/enabled=1/c\enabled=0' /etc/default/apport
|
||||
```
|
||||
|
||||
### Hide suspend button
|
||||
cd /home/cpi/.config/xfce4/xfconf/xfce-perchannel-xml
|
||||
```
|
||||
sudo sed -i 's/\(name\=\".*ShowSuspend.*\"\s\)value="\(true\|false\)"/\1value=\"false\"/gi' xfce4-session.xml
|
||||
|
||||
sudo sed -i 's/\(type\=\".*string.*\"\s\)value="\(+suspend\)"/\1value=\"-suspend\"/gi' xfce4-panel.xml
|
||||
|
||||
```
|
||||
|
||||
### Add framebuffer console rotate /boot/armbianEnv.txt
|
||||
```
|
||||
extraargs=fbcon=rotate:1
|
||||
```
|
||||
|
||||
### Change ssh login banner
|
||||
In `/etc/update-motd.d/10-armbian-header`
|
||||
```
|
||||
TERM=linux toilet -f standard -F metal $(echo $BOARD_NAME | sed 's/Orange Pi/OPi/' | sed 's/NanoPi/NPi/' | sed 's/Banana Pi/BPi/' | sed 's/Clockworkpi A04/Clockworkpi/')
|
||||
```
|
||||
|
||||
### Install devterm packages
|
||||
```
|
||||
sudo apt update
|
||||
sudo apt install -y devterm-wiringpi-cpi-a04 devterm-thermal-printer devterm-thermal-printer-cups devterm-first-start-a04 devterm-fan-daemon-cpi-a04 devterm-audio-patch
|
||||
|
||||
```
|
||||
### Disable sshd
|
||||
```
|
||||
sudo touch /etc/ssh/sshd_not_to_be_run
|
||||
|
||||
```
|
||||
### Install ibus input method for CJK
|
||||
|
||||
`sudo apt install ibus ibus-pinyin ibus-gtk ibus-gtk3 -y`
|
||||
```
|
||||
cat <<EOF >/home/cpi/.config/autostart/ibus.desktop
|
||||
[Desktop Entry]
|
||||
Exec=ibus-daemon -drxR
|
||||
GenericName=IBus
|
||||
Name[zh_CN]=IBus
|
||||
Name=IBus
|
||||
Name[en_US]=IBus
|
||||
StartupNotify=true
|
||||
Terminal=false
|
||||
Type=Application
|
||||
EOF
|
||||
```
|
||||
|
||||
```
|
||||
sudo bash -c 'cat <<EOF >/etc/profile.d/ibus.sh
|
||||
#!/bin/bash
|
||||
|
||||
export XIM_PROGRAM=ibus
|
||||
export XIM=ibus
|
||||
export XMODIFIERS=@im=ibus
|
||||
export GTK_IM_MODULE=ibus
|
||||
export QT_IM_MODULE=ibus
|
||||
EOF'
|
||||
```
|
||||
### GDM3
|
||||
due to the panfrost screen flashing issue with lightdm,use gdm3 instead of lightdm
|
||||
` sudo apt install gdm3`
|
||||
```
|
||||
sudo bash -c 'cat <<EOF > /usr/share/gdm/greeter/autostart/01_rotate.desktop
|
||||
[Desktop Entry]
|
||||
Version=1.0
|
||||
Type=Application
|
||||
Name=Rotate Screen
|
||||
Exec=/etc/lightdm/setup.sh
|
||||
Terminal=false
|
||||
NoDisplay=true
|
||||
EOF'
|
||||
```
|
||||
#### gdm3 background and hide poweroff,suspend
|
||||
In `/etc/gdm3/greeter.dconf-defaults `
|
||||
```
|
||||
...
|
||||
[org/gnome/desktop/background]
|
||||
picture-options='none'
|
||||
primary-color='#222222'
|
||||
...
|
||||
|
||||
[org/gnome/login-screen]
|
||||
disable-restart-buttons=true
|
||||
```
|
||||
#### config gdm3 autologin
|
||||
/etc/gdm3/custom.conf
|
||||
|
||||
```
|
||||
[daemon]
|
||||
...
|
||||
AutomaticLoginEnable = true
|
||||
AutomaticLogin = cpi
|
||||
```
|
||||
|
||||
## libreoffice fix for panfrost issue
|
||||
` sudo apt install libreoffice-gtk3 `
|
||||
|
||||
# Exit from chroot
|
||||
```
|
||||
exit
|
||||
(out)
|
||||
sudo umount /mnt/p1/dev/pts
|
||||
sudo umount /mnt/p1/dev
|
||||
sudo umount /mnt/p1/proc
|
||||
sudo umount /mnt/p1/sys
|
||||
##clear bash
|
||||
sudo rm -rf root/.bash_history
|
||||
cd -
|
||||
sudo umount /mnt/p1
|
||||
sudo losetup -D /dev/loop11
|
||||
```
|
||||
@@ -1,212 +0,0 @@
|
||||
# Intro
|
||||
DevTerm A06 os image based on Armbian with current kernel branch, XFCE desktop
|
||||
and it is better to run a Ubuntu 21.04 in a VirtualBox with a good bandwidth network to do all the jobs
|
||||
If the condition of the network is not so well,
|
||||
the Armbian build process will fail on some packages downloading or mirrors connecting
|
||||
|
||||
The entire operation requires a certain experience in linux
|
||||
be careful
|
||||
|
||||
**This wiki maybe outdated since armbian build system is always updating , so don't panic**
|
||||
|
||||
# Build armbian image for A06
|
||||
```
|
||||
cd ~
|
||||
git clone https://github.com/armbian/build.git
|
||||
git clone https://github.com/clockworkpi/DevTerm.git
|
||||
|
||||
cd build
|
||||
git reset --hard 43d179914ae9e1ebb5d72315d9f9f68f5fb3e330
|
||||
|
||||
mkdir -p userpatches/kernel/rockchip64-current/
|
||||
mkdir -p userpatches/u-boot/u-boot-rockchip64-mainline/
|
||||
|
||||
git apply ~/DevTerm/Code/patch/armbian_build_a06/patch/armbian.patch
|
||||
cp ~/DevTerm/Code/patch/armbian_build_a06/patch/kernel*.patch userpatches/kernel/rockchip64-current/
|
||||
cp ~/DevTerm/Code/patch/armbian_build_a06/patch/uboot*.patch userpatches/u-boot/u-boot-rockchip64-mainline/
|
||||
cp -f ~/DevTerm/Code/patch/armbian_build_a06/patch/lib.config userpatches/
|
||||
cp ~/DevTerm/Code/patch/armbian_build_a06/patch/clockworkpi-a06.conf config/boards/
|
||||
|
||||
#Then exec ./compile.sh under armbian build
|
||||
cd ~/build && sudo ./compile.sh BOARD=clockworkpi-a06 BRANCH=current BUILD_MINIMAL=no BUILD_DESKTOP=no KERNEL_ONLY=yes KERNEL_CONFIGURE=no
|
||||
```
|
||||
|
||||
after image done
|
||||
uncompress the
|
||||
`linux-dtb-current-rockchip64_21.08.0-trunk_arm64.deb`
|
||||
`linux-image-current-rockchip64_21.08.0-trunk_arm64.deb`
|
||||
|
||||
and then combine all files ,all the postinst, preinst,prerm,postrm
|
||||
to be one `devterm-kernel-current-cpi-a06.deb`
|
||||
the reason is if not doing this , `apt-get upgrade` will replace the linux-dto,linux-image* in future, which will cause boot failed
|
||||
so to keep a06 linux kernel in safe , I made devterm-kernel-current-cpi-a06
|
||||
|
||||
# Chroot image
|
||||
```
|
||||
sudo losetup -P /dev/loop0 Armbian_21.08.0-trunk_Clockworkpi-a06_focal_current_5.10.55_xfce_desktop.img
|
||||
sudo mount /dev/loop0p1 /mnt/p1
|
||||
|
||||
cd /mnt/p1
|
||||
sudo mount --bind /dev dev/
|
||||
sudo mount --bind /sys sys/
|
||||
sudo mount --bind /proc proc/
|
||||
sudo mount --bind /dev/pts dev/pts
|
||||
sudo mv etc/ld.so.preload etc/ld_so_preload
|
||||
sudo chroot .
|
||||
```
|
||||
|
||||
## Inside Chroot
|
||||
### Run password wizard
|
||||
```
|
||||
sh /etc/profile.d/armbian-check-first-login.sh
|
||||
```
|
||||
set **root** password,create default user **cpi** with password **cpi**
|
||||
```
|
||||
touch /home/cpi/.first_start
|
||||
chown cpi:cpi /home/cpi/.first_start
|
||||
```
|
||||
### Install devterm software
|
||||
```
|
||||
sudo apt update
|
||||
sudo apt install curl wget -y
|
||||
|
||||
curl https://raw.githubusercontent.com/clockworkpi/apt/main/debian/KEY.gpg | sudo tee /etc/apt/trusted.gpg.d/clockworkpi.asc
|
||||
echo "deb https://raw.githubusercontent.com/clockworkpi/apt/main/debian/ stable main" | sudo tee /etc/apt/sources.list.d/clockworkpi.list
|
||||
|
||||
sudo apt update
|
||||
sudo apt remove linux-image*
|
||||
sudo apt install devterm-kernel-current-cpi-a06 devterm-fan-daemon-cpi-a06 devterm-thermal-printer devterm-thermal-printer-cups devterm-wiringpi-cpi devterm-first-start-a06 devterm-audio-patch
|
||||
```
|
||||
|
||||
### /boot/ArmbianEnv.txt
|
||||
```
|
||||
bootlogo=false
|
||||
extraargs= fbcon=rotate:1
|
||||
...
|
||||
```
|
||||
|
||||
|
||||
### autologin
|
||||
```
|
||||
sudo bash -c 'cat <<EOF > /etc/lightdm/lightdm.conf.d/12-autologin.conf
|
||||
|
||||
[Seat:*]
|
||||
autologin-user=cpi
|
||||
autologin-user-timeout=0
|
||||
EOF'
|
||||
```
|
||||
|
||||
### config lightdm
|
||||
```
|
||||
sudo bash -c 'cat << EOF > /etc/lightdm/lightdm.conf.d/13-rotate-dsi.conf
|
||||
[Seat:*]
|
||||
greeter-setup-script=/etc/lightdm/setup.sh
|
||||
EOF'
|
||||
|
||||
sudo bash -c 'cat <<EOF >/etc/lightdm/setup.sh
|
||||
#!/bin/bash
|
||||
xrandr --output DSI-1 --rotate right
|
||||
exit 0
|
||||
EOF'
|
||||
|
||||
sudo chmod +x /etc/lightdm/setup.sh
|
||||
```
|
||||
|
||||
### config xrandr
|
||||
```
|
||||
sudo bash -c 'cat << EOF > /etc/X11/Xsession.d/100custom_xrandr
|
||||
xrandr --output DSI-1 --rotate right
|
||||
EOF'
|
||||
```
|
||||
|
||||
### additional software
|
||||
```
|
||||
sudo apt remove celluloid mpv
|
||||
sudo apt install -y arandr chromium-browser vlc cpupower-gui xfce4-power-manager
|
||||
```
|
||||
### /etc/default/apport
|
||||
`enable=0`
|
||||
|
||||
### ssh banner fix
|
||||
/etc/update-motd.d/10-armbian-header
|
||||
```
|
||||
.... sed 's/Banana Pi/BPi/' | sed 's/Clockworkpi A06/Clockworkpi/')
|
||||
|
||||
```
|
||||
### Disable Display power management in xfce4 power manager
|
||||
display power management must be disabled ,once the display turn off, you need to reboot to get it back
|
||||
~/.config/xfce4/xfconf/xfce-perchannel-xml/xfce4-power-manager.xml
|
||||
|
||||
```
|
||||
<?xml version="1.0" encoding="UTF-8"?>
|
||||
|
||||
<channel name="xfce4-power-manager" version="1.0">
|
||||
<property name="xfce4-power-manager" type="empty">
|
||||
<property name="power-button-action" type="empty"/>
|
||||
<property name="brightness-switch-restore-on-exit" type="int" value="0"/>
|
||||
<property name="brightness-switch" type="int" value="0"/>
|
||||
<property name="show-tray-icon" type="int" value="1"/>
|
||||
<property name="lid-action-on-battery" type="uint" value="1"/>
|
||||
<property name="logind-handle-lid-switch" type="bool" value="false"/>
|
||||
<property name="lid-action-on-ac" type="uint" value="0"/>
|
||||
<property name="inactivity-sleep-mode-on-battery" type="uint" value="1"/>
|
||||
<property name="sleep-button-action" type="uint" value="1"/>
|
||||
<property name="hibernate-button-action" type="uint" value="1"/>
|
||||
<property name="lock-screen-suspend-hibernate" type="bool" value="false"/>
|
||||
<property name="critical-power-action" type="uint" value="4"/>
|
||||
<property name="critical-power-level" type="uint" value="5"/>
|
||||
<property name="dpms-enabled" type="bool" value="false"/>
|
||||
<property name="blank-on-ac" type="int" value="0"/>
|
||||
<property name="brightness-on-battery" type="uint" value="120"/>
|
||||
<property name="blank-on-battery" type="int" value="0"/>
|
||||
<property name="brightness-on-ac" type="uint" value="120"/>
|
||||
<property name="brightness-level-on-battery" type="uint" value="40"/>
|
||||
<property name="brightness-level-on-ac" type="uint" value="42"/>
|
||||
</property>
|
||||
</channel>
|
||||
```
|
||||
### Default wallpaper
|
||||
```
|
||||
/usr/share/backgrounds/xfce/xfce-verticals.png
|
||||
```
|
||||
# Quit Chroot
|
||||
```
|
||||
exit
|
||||
sudo mv etc/ld_so_preload etc/ld.so.preload
|
||||
|
||||
sudo umount /mnt/p1/dev/pts
|
||||
sudo umount /mnt/p1/dev
|
||||
sudo umount /mnt/p1/proc
|
||||
sudo umount /mnt/p1/sys
|
||||
##clear bash
|
||||
sudo rm -rf root/.bash_history
|
||||
sudo rm usr/bin/qemu-arm-static
|
||||
|
||||
cd -
|
||||
sudo umount /mnt/p1
|
||||
```
|
||||
|
||||
umount may failed at /mnt/p1/dev
|
||||
just use `ps aux | grep cupsd` to see if there a process named like `/usr/bin/qemu-aarch64-static /usr/sbin/cupsd -C /etc/cups/cupsd.conf -s /etc/cups/cups-files.conf`
|
||||
|
||||
find the pid ,use `sudo kill -9 ${pid}` with that pid
|
||||
then umount again
|
||||
|
||||
|
||||
|
||||
# Flash the image to SD card
|
||||
* Linux
|
||||
`sudo dd if=Armbian_21.08.0-trunk_Clockworkpi-a06_focal_current_5.10.55_xfce_desktop.img of=/dev/sdX bs=8M status=progress`
|
||||
|
||||
|
||||
# Ubuntu 2104 Hirsute went offline
|
||||
fix:
|
||||
https://forum.clockworkpi.com/t/hirsute-went-offline-late-july-2022-how-to-manage/8770/3
|
||||
|
||||
new os image: 26f52bfde573479960d8696f407d19b9 http://dl.clockworkpi.com/DevTerm_A06_v0.2h.img.bz2
|
||||
switched to ubuntu jammy ,LTS up to 2037
|
||||
|
||||
# 2023 06 30 new kernel patch:
|
||||
https://github.com/clockworkpi/uConsole/tree/master/Code/patch/a06/20230630
|
||||
|
||||
|
||||
@@ -1,94 +0,0 @@
|
||||
## Intro
|
||||
The image based on raspberry pi os
|
||||
and it is better to run a Ubuntu 21.04 in a VirtualBox to do all the jobs
|
||||
The entire operation requires a certain experience in linux
|
||||
be careful
|
||||
|
||||
## Start a chroot env
|
||||
```
|
||||
wget https://downloads.raspberrypi.org/raspios_full_armhf/images/raspios_full_armhf-2021-05-28/2021-05-07-raspios-buster-armhf-full.zip
|
||||
|
||||
unzip 2021-05-07-raspios-buster-armhf-full.zip
|
||||
|
||||
sudo losetup --show -f -P 2021-05-07-raspios-buster-armhf-full.img #assume loop0
|
||||
sudo mount /dev/loop0p2 /mnt/p2
|
||||
sudo mount /dev/loop0p1 /mnt/p2/boot
|
||||
|
||||
cd /mnt/p2
|
||||
sudo mount --bind /dev dev/
|
||||
sudo mount --bind /sys sys/
|
||||
sudo mount --bind /proc proc/
|
||||
sudo mount --bind /dev/pts dev/pts
|
||||
#sudo mv etc/ld.so.preload etc/ld_so_preload
|
||||
sudo chroot .
|
||||
```
|
||||
|
||||
## Inside chroot
|
||||
```
|
||||
curl https://raw.githubusercontent.com/clockworkpi/apt/main/debian/KEY.gpg | sudo tee /etc/apt/trusted.gpg.d/clockworkpi.asc
|
||||
|
||||
echo "deb https://raw.githubusercontent.com/clockworkpi/apt/main/debian/ stable main" | sudo tee -a /etc/apt/sources.list.d/clockworkpi.list
|
||||
|
||||
sudo apt update && sudo apt install devterm-thermal-printer devterm-keyboard-firmware devterm-fan-temp-daemon-rpi devterm-thermal-printer-cups devterm-kernel-rpi devterm-audio-patch -y
|
||||
```
|
||||
**Config xrandr**
|
||||
```
|
||||
sudo bash -c 'cat << EOF > etc/X11/Xsession.d/100custom_xrandr
|
||||
xrandr --output DSI-1 --rotate right
|
||||
EOF'
|
||||
```
|
||||
**config lightdm**
|
||||
|
||||
`/etc/lightdm/lightdm.conf`
|
||||
|
||||
`greeter-setup-script=/etc/lightdm/setup.sh`
|
||||
```
|
||||
sudo bash -c 'cat <<EOF >/etc/lightdm/setup.sh
|
||||
#!/bin/bash
|
||||
xrandr --output DSI-1 --rotate right
|
||||
exit 0
|
||||
EOF'
|
||||
```
|
||||
`sudo chmod +x /etc/lightdm/setup.sh`
|
||||
|
||||
**Modify /etc/dphys-swapfile**
|
||||
```
|
||||
CONF_SWAPSIZE=512
|
||||
```
|
||||
|
||||
**Change the default wallpaper**
|
||||
The following files changed
|
||||
|
||||
* /etc/xdg/pcmanfm/LXDE-pi/desktop-items-0.conf
|
||||
* /etc/xdg/pcmanfm/LXDE-pi/desktop-items-1.conf
|
||||
* /etc/lightdm/pi-greeter.conf
|
||||
* /home/pi/.config/pcmanfm/LXDE-pi/desktop-items-0.conf
|
||||
|
||||
Delete wallpaper address `temple.jpg`,change the `desktop_bg` color to `#202020`
|
||||
change `/etc/hostname` to clockworkpi
|
||||
in `/boot/cmdline.txt` ,add `fbcon=rotate:1`, remove `quiet`
|
||||
|
||||
### Now quit the chroot env
|
||||
```
|
||||
exit
|
||||
#sudo mv etc/ld_so_preload etc/ld.so.preload
|
||||
|
||||
sudo umount /mnt/p2/dev/pts
|
||||
sudo umount /mnt/p2/dev
|
||||
sudo umount /mnt/p2/proc
|
||||
sudo umount /mnt/p2/sys
|
||||
##clear bash
|
||||
sudo rm -rf root/.bash_history
|
||||
#sudo rm usr/bin/qemu-arm-static
|
||||
|
||||
cd -
|
||||
sudo umount /mnt/p2/boot
|
||||
sudo umount /mnt/p2
|
||||
sudo losetup -D /dev/loop0 #assume loop0
|
||||
```
|
||||
|
||||
### Flash the image to SD card
|
||||
* Linux
|
||||
`sudo dd if=2021-05-07-raspios-buster-armhf-full.img of=/dev/sdX bs=8M status=progress`
|
||||
|
||||
|
||||
@@ -1,140 +0,0 @@
|
||||
## Intro
|
||||
The image based on raspberry pi os
|
||||
for raspberry pi cm4 with devterm cm4 adapter
|
||||
and it is better to run a Ubuntu 21.04 in a VirtualBox to do all the jobs
|
||||
The entire operation requires a certain experience in linux
|
||||
be careful
|
||||
|
||||
## Start a chroot env
|
||||
```bash
|
||||
wget https://downloads.raspberrypi.org/raspios_full_armhf/images/raspios_full_armhf-2021-05-28/2021-05-07-raspios-buster-armhf-full.zip
|
||||
|
||||
unzip 2021-05-07-raspios-buster-armhf-full.zip
|
||||
|
||||
sudo losetup --show -f -P 2021-05-07-raspios-buster-armhf-full.img #assume loop0
|
||||
sudo mount /dev/loop0p2 /mnt/p2
|
||||
sudo mount /dev/loop0p1 /mnt/p2/boot
|
||||
|
||||
cd /mnt/p2
|
||||
sudo mount --bind /dev dev/
|
||||
sudo mount --bind /sys sys/
|
||||
sudo mount --bind /proc proc/
|
||||
sudo mount --bind /dev/pts dev/pts
|
||||
#sudo mv etc/ld.so.preload etc/ld_so_preload
|
||||
sudo chroot .
|
||||
```
|
||||
|
||||
## Inside chroot
|
||||
```bash
|
||||
curl https://raw.githubusercontent.com/clockworkpi/apt/main/debian/KEY.gpg | sudo tee /etc/apt/trusted.gpg.d/clockworkpi.asc
|
||||
|
||||
echo "deb https://raw.githubusercontent.com/clockworkpi/apt/main/debian/ stable main" | sudo tee -a /etc/apt/sources.list.d/clockworkpi.list
|
||||
|
||||
sudo apt update && sudo apt install devterm-thermal-printer-cm4 devterm-fan-temp-daemon-cm4 devterm-kernel-cm4-rpi devterm-audio-patch devterm-wiringpi-cm4-cpi -y
|
||||
|
||||
sudo apt install -y devterm-thermal-printer-cups
|
||||
```
|
||||
**Config xrandr**
|
||||
```
|
||||
sudo bash -c 'cat << EOF > etc/X11/Xsession.d/100custom_xrandr
|
||||
xrandr --output DSI-1 --rotate right
|
||||
EOF'
|
||||
```
|
||||
**config lightdm**
|
||||
|
||||
`/etc/lightdm/lightdm.conf`
|
||||
|
||||
`greeter-setup-script=/etc/lightdm/setup.sh`
|
||||
```
|
||||
sudo bash -c 'cat <<EOF >/etc/lightdm/setup.sh
|
||||
#!/bin/bash
|
||||
xrandr --output DSI-1 --rotate right
|
||||
exit 0
|
||||
EOF'
|
||||
```
|
||||
`sudo chmod +x /etc/lightdm/setup.sh`
|
||||
|
||||
**Modify /etc/dphys-swapfile**
|
||||
```
|
||||
CONF_SWAPSIZE=512
|
||||
```
|
||||
|
||||
**Change the default wallpaper**
|
||||
The following files changed
|
||||
|
||||
* /etc/xdg/pcmanfm/LXDE-pi/desktop-items-0.conf
|
||||
* /etc/xdg/pcmanfm/LXDE-pi/desktop-items-1.conf
|
||||
* /etc/lightdm/pi-greeter.conf
|
||||
* /home/pi/.config/pcmanfm/LXDE-pi/desktop-items-0.conf
|
||||
|
||||
Delete wallpaper address `temple.jpg`,change the `desktop_bg` color to `#202020`
|
||||
change `/etc/hostname` to clockworkpi
|
||||
in `/boot/cmdline.txt` ,add `fbcon=rotate:1`, remove `quiet`
|
||||
|
||||
**Screen rotation**
|
||||
change
|
||||
```
|
||||
/etc/skel/.config/monitors.xml
|
||||
/home/{pi,rpi-first-boot-wizard}/.config/monitors.xml
|
||||
```
|
||||
to be like
|
||||
```xml
|
||||
<monitors version="2">
|
||||
<configuration>
|
||||
<logicalmonitor>
|
||||
<x>0</x>
|
||||
<y>0</y>
|
||||
<primary>yes</primary>
|
||||
<monitor>
|
||||
<monitorspec>
|
||||
<connector>DSI-1</connector>
|
||||
<vendor>unknown</vendor>
|
||||
<product>unknown</product>
|
||||
<serial>unknown</serial>
|
||||
</monitorspec>
|
||||
<mode>
|
||||
<width>480</width>
|
||||
<height>1280</height>
|
||||
<rate>60.000</rate>
|
||||
</mode>
|
||||
</monitor>
|
||||
<transform>
|
||||
<rotation>right</rotation>
|
||||
</transform>
|
||||
</logicalmonitor>
|
||||
</configuration>
|
||||
</monitors>
|
||||
```
|
||||
for uConsole, replace **480 to 720** in above **monitors.xml**
|
||||
|
||||
### console rotation
|
||||
/boot/cmdline.txt add **fbcon=rotate:1** in the end of
|
||||
```
|
||||
console=......... fbcon=rotate:1
|
||||
|
||||
```
|
||||
|
||||
|
||||
### Now quit the chroot env
|
||||
```bash
|
||||
exit
|
||||
#sudo mv etc/ld_so_preload etc/ld.so.preload
|
||||
|
||||
sudo umount /mnt/p2/dev/pts
|
||||
sudo umount /mnt/p2/dev
|
||||
sudo umount /mnt/p2/proc
|
||||
sudo umount /mnt/p2/sys
|
||||
##clear bash
|
||||
sudo rm -rf root/.bash_history
|
||||
#sudo rm usr/bin/qemu-arm-static
|
||||
|
||||
cd -
|
||||
sudo umount /mnt/p2/boot
|
||||
sudo umount /mnt/p2
|
||||
sudo losetup -D /dev/loop0 #assume loop0
|
||||
```
|
||||
|
||||
### Flash the image to SD card
|
||||
* Linux
|
||||
`sudo dd if=2021-05-07-raspios-buster-armhf-full.img of=/dev/sdX bs=8M status=progress`
|
||||
|
||||
@@ -1,471 +0,0 @@
|
||||
|
||||
# Before start
|
||||
Our system image is modified based on fedora wiki
|
||||
Mainly replace the kernel and rootfs
|
||||
Some linux experience is required to handle every possible situation
|
||||
there are some discrepancies with the final system image
|
||||
So this document is more suitable for the guidance of the R-01 system image
|
||||
|
||||
|
||||
# Prepare
|
||||
|
||||
a ubuntu linux system, like ubuntu 21.04
|
||||
|
||||
install riscv64 gcc
|
||||
```
|
||||
sudo apt install gcc-11-riscv64-linux-gnu binutils-riscv64-linux-gnu
|
||||
sudo apt install git
|
||||
sudo apt install make
|
||||
sudo apt install build-essential
|
||||
sudo apt install libfontconfig1
|
||||
sudo apt install ncurses-devel
|
||||
sudo apt install libncurses-dev
|
||||
sudo apt install build-essential
|
||||
sudo apt install flex bison
|
||||
sudo apt install python3-distutils
|
||||
sudo apt install swig
|
||||
sudo apt install python3-dev
|
||||
sudo apt install openssl
|
||||
sudo apt install libssl-dev
|
||||
|
||||
```
|
||||
|
||||
install qemu static for chroot
|
||||
|
||||
`sudo apt install qemu-user-static`
|
||||
|
||||
|
||||
manually fix default compiler link:
|
||||
|
||||
```
|
||||
sudo ln -s /usr/bin/riscv64-linux-gnu-cpp-11 /usr/bin/riscv64-linux-gnu-cpp
|
||||
sudo ln -s /usr/bin/riscv64-linux-gnu-gcc-nm-11 /usr/bin/riscv64-linux-gnu-gcc-nm
|
||||
sudo ln -s /usr/bin/riscv64-linux-gnu-gcov-dump-11 /usr/bin/riscv64-linux-gnu-gcov-dump
|
||||
sudo ln -s /usr/bin/riscv64-linux-gnu-gcc-11 /usr/bin/riscv64-linux-gnu-gcc
|
||||
sudo ln -s /usr/bin/riscv64-linux-gnu-gcc-ranlib-11 /usr/bin/riscv64-linux-gnu-gcc-ranlib
|
||||
sudo ln -s /usr/bin/riscv64-linux-gnu-gcov-tool-11 /usr/bin/riscv64-linux-gnu-gcov-tool
|
||||
sudo ln -s /usr/bin/riscv64-linux-gnu-gcc-ar-11 /usr/bin/riscv64-linux-gnu-gcc-ar
|
||||
sudo ln -s /usr/bin/riscv64-linux-gnu-gcov-11 /usr/bin/riscv64-linux-gnu-gcov
|
||||
sudo ln -s /usr/bin/riscv64-linux-gnu-lto-dump-11 /usr/bin/riscv64-linux-gnu-lto-dump
|
||||
```
|
||||
|
||||
|
||||
# Bootloader
|
||||
|
||||
### reference doc:
|
||||
https://fedoraproject.org/wiki/Architectures/RISC-V/Allwinner
|
||||
|
||||
|
||||
```
|
||||
git clone https://github.com/smaeul/sun20i_d1_spl
|
||||
pushd sun20i_d1_spl
|
||||
git checkout origin/mainline
|
||||
make CROSS_COMPILE=riscv64-linux-gnu- p=sun20iw1p1 mmc
|
||||
popd
|
||||
```
|
||||
|
||||
```
|
||||
pushd sun20i_d1_spl
|
||||
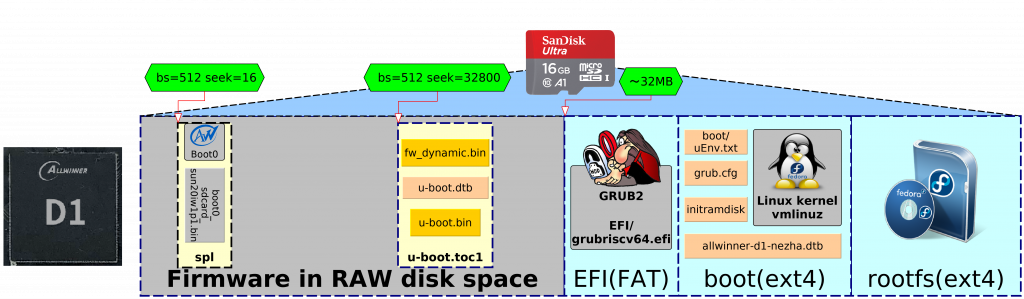
sudo dd if=nboot/boot0_sdcard_sun20iw1p1.bin of=/dev/sdX bs=512 seek=16
|
||||
```
|
||||
|
||||
git clone https://github.com/tekkamanninja/opensbi -b allwinner_d1
|
||||
pushd opensbi
|
||||
CROSS_COMPILE=riscv64-linux-gnu- PLATFORM=generic FW_PIC=y BUILD_INFO=y make
|
||||
popd
|
||||
|
||||
```
|
||||
git clone https://github.com/tekkamanninja/u-boot -b allwinner_d1
|
||||
pushd u-boot
|
||||
make CROSS_COMPILE=riscv64-linux-gnu- ARCH=riscv nezha_defconfig
|
||||
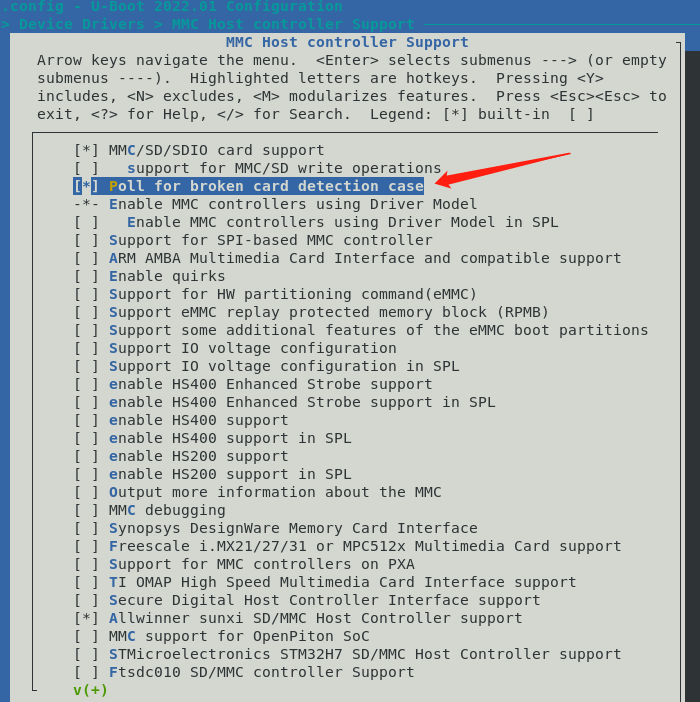
make CROSS_COMPILE=riscv64-linux-gnu- ARCH=riscv menuconfig
|
||||
make CROSS_COMPILE=riscv64-linux-gnu- ARCH=riscv u-boot.bin u-boot.dtb
|
||||
popd
|
||||
```
|
||||
**in menuconfig, there is an import option must be selected:**
|
||||
|
||||
|
||||
|
||||
otherwises, the boot will hang
|
||||
|
||||
|
||||
## u-boot.toc1
|
||||
|
||||
**toc1.cfg**
|
||||
|
||||
```
|
||||
[opensbi]
|
||||
file = fw_dynamic.bin
|
||||
addr = 0x40000000
|
||||
[dtb]
|
||||
file = u-boot.dtb
|
||||
addr = 0x44000000
|
||||
[u-boot]
|
||||
file = u-boot.bin
|
||||
addr = 0x4a000000
|
||||
```
|
||||
```
|
||||
pushd u-boot
|
||||
cp ${PATH_TO_TOC1_CFG}/toc1.cfg ${PATH_TO_OPENSBI}/fw_dynamic.bin .
|
||||
tools/mkimage -T sunxi_toc1 -d toc1.cfg u-boot.toc1
|
||||
popd
|
||||
```
|
||||
|
||||
pushd u-boot
|
||||
sudo dd if=u-boot.toc1 of=/dev/sdX bs=512 seek=32800
|
||||
|
||||
|
||||
|
||||
# Disk partition prepare
|
||||
|
||||
## Original fedora image fdisk partition
|
||||
```
|
||||
Units: sectors of 1 * 512 = 512 bytes
|
||||
Sector size (logical/physical): 512 bytes / 512 bytes
|
||||
I/O size (minimum/optimal): 512 bytes / 512 bytes
|
||||
Disklabel type: dos
|
||||
Disk identifier: 0xda568ce2
|
||||
|
||||
Device Boot Start End Sectors Size Id Type
|
||||
fedora-riscv64-d1-developer-xfce-rawhide-Rawhide-20211124-132603.n.0-sda.raw.img2 69632 319487 249856 122M c W95 FAT32 (LBA)
|
||||
fedora-riscv64-d1-developer-xfce-rawhide-Rawhide-20211124-132603.n.0-sda.raw.img3 * 319488 1320959 1001472 489M 83 Linux
|
||||
fedora-riscv64-d1-developer-xfce-rawhide-Rawhide-20211124-132603.n.0-sda.raw.img4 1320960 25319423 23998464 11.5G 83 Linux
|
||||
```
|
||||
|
||||
|
||||
## Create disk image file
|
||||
|
||||
### create image file with dd
|
||||
```
|
||||
MEGA=16777216
|
||||
|
||||
dd if=/dev/zero bs=$MEGA count=1024 of=disk.img
|
||||
echo -e "o\nn\np\n2\n69632\n319487\nn\np\n3\n319488\n1320959\nn\np\n4\n1320960\n\n\nt\n2\nc\na\n3\n\nw" | fdisk disk.img
|
||||
fdisk -l disk.img
|
||||
```
|
||||
```
|
||||
sudo losetup --show -f -P disk.img #/dev/loop1
|
||||
sudo mkfs.vfat /dev/loop1p2
|
||||
sudo mkfs.ext4 /dev/loop1p3
|
||||
sudo mkfs.ext4 /dev/loop1p4
|
||||
```
|
||||
|
||||
# Download ubuntu riscv image for rootfs
|
||||
|
||||
https://wiki.ubuntu.com/RISC-V
|
||||
|
||||
https://cdimage.ubuntu.com/releases/21.04/release/
|
||||
|
||||
https://cdimage.ubuntu.com/releases/21.04/release/ubuntu-21.04-preinstalled-server-riscv64+unmatched.img.xz
|
||||
|
||||
## Take rootfs of ubuntu out
|
||||
```
|
||||
sudo losetup --show -f -P ubuntu-21.04-preinstalled-server-riscv64+unmatched.img # eg: /dev/loop1,depends on your linux system
|
||||
|
||||
sudo mount /dev/loop1p1 /mnt/p1
|
||||
sudo tar cpjfv ubuntu-21.04-preinstalled-server-riscv64+unmatched_rootfs.tar.bz2 -C /mnt/p1/ .
|
||||
sudo umount /mnt/p1
|
||||
sudo losetup -D /dev/loop1 #dettach,release /dev/loop1
|
||||
```
|
||||
download link:
|
||||
https://mega.nz/file/IQFlWZKL#_ERlz3GXoUgxsIoaLHK8oQ2A6SNFcHhZpS2tF3N6RaQ
|
||||
https://mega.nz/file/IIlAHKST#PP8feOr6tHxdbD-Zoyj64G4TfG7HG_1s3VHasisP6h0
|
||||
|
||||
|
||||
|
||||
## Prebuilt files
|
||||
|
||||
### boot partition
|
||||
|
||||
|
||||
#### ubuntu_2104_devterm_d1_boot.tar.bz2
|
||||
```
|
||||
https://mega.nz/file/NEsV1SRQ#FexV7wJhiUQKLcfBol4bB5m8UsX1O5qWet8geONclY4
|
||||
https://mega.nz/file/YJUjiKKb#nrxH6BDvyGjpNSyZEzbRqbHk9ed9RE7jcuOPbTdximM
|
||||
```
|
||||
|
||||
*included files*
|
||||
|
||||
```
|
||||
├── board.dtb
|
||||
├── **boot**
|
||||
│ └── uEnv.txt
|
||||
├── config-5.4.61
|
||||
├── **efi**
|
||||
├── **extlinux**
|
||||
│ ├── extlinux.conf
|
||||
│ └── extlinux.conf.cpi.bak
|
||||
├── **grub2**
|
||||
│ └── **themes**
|
||||
│ └── **system**
|
||||
│ └── **background.png**
|
||||
├── grub.cfg
|
||||
├── System.map-5.4.61
|
||||
├── **uEnv.txt** -\> boot/uEnv.txt
|
||||
└── vmlinuz-5.4.61
|
||||
```
|
||||
|
||||
#### ubuntu_2104_devterm_d1_EFI.tar.bz2
|
||||
|
||||
https://mega.nz/file/kNUBRBIB#NsPzKTDWbfBSTth7-eVz9gPjeaEdYnP7PfuYGz28cOk
|
||||
|
||||
**extlinux.conf is the file actually do the boot configuration**
|
||||
|
||||
# How to compile kernel
|
||||
|
||||
## get kernel source
|
||||
https://github.com/cuu/last_linux-5.4.git
|
||||
|
||||
it is a mirror kernel code from tina_d1_h of all winner with all patched for devterm R-01
|
||||
## Official toolchain
|
||||
https://github.com/cuu/toolchain-thead-glibc #It's official allwinner toolchain
|
||||
download toolchain
|
||||
|
||||
## Steps for compiling kernel
|
||||
|
||||
extract and put toolchain in any folder you like
|
||||
|
||||
then edit **m.sh** in `last_linux-5.4`
|
||||
|
||||
set correct path of toolchain for PATH
|
||||
|
||||
```
|
||||
export PATH=/data/tina_d1_h/prebuilt/gcc/linux-x86/riscv/toolchain-thead-glibc/riscv64-glibc-gcc-thead_20200702/bin/:$PATH
|
||||
|
||||
```
|
||||
to be
|
||||
```
|
||||
export PATH=/wherever_you_put_toolchain/riscv64-glibc-gcc-thead_20200702/bin/:$PATH
|
||||
```
|
||||
|
||||
then simply run ./m.sh to compile kernel
|
||||
|
||||
we just simple use the prebuit toolchain from all-winner to compile the patched kernel code based on all-winner tina for devterm_r01
|
||||
|
||||
and we have to ,because allwinner prebuilt toolchain has the neccessary custom opcode for the kernel of R-01
|
||||
|
||||
kernel patch url: https://github.com/clockworkpi/DevTerm/tree/main/Code/patch/d1
|
||||
|
||||
to get original tina code from allwinner ,visit https://open.allwinnertech.com/
|
||||
|
||||
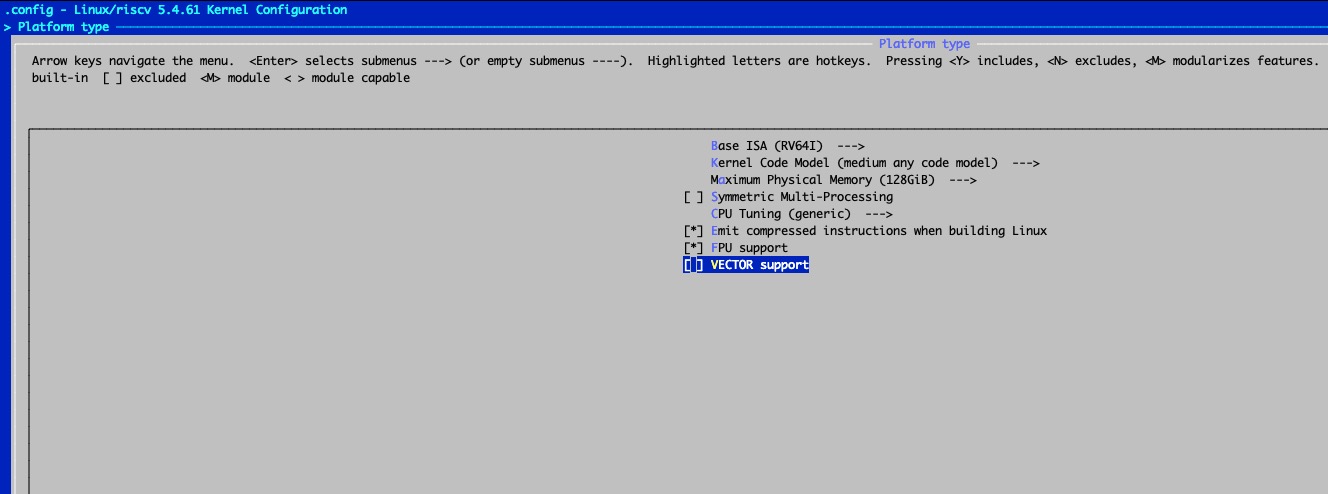
## Mainline toolchain
|
||||
https://github.com/riscv/riscv-gnu-toolchain
|
||||
all the same as Official toolchain except need to disable Vector in kernel `make menuconfig`
|
||||
|
||||
|
||||
|
||||
# Make alpha os image
|
||||
|
||||
required file list:
|
||||
* ubuntu_2104_devterm_d1_EFI.tar.bz2
|
||||
* ubuntu_2104_devterm_d1_boot.tar.bz2
|
||||
* ubuntu-21.04-preinstalled-server-riscv64+unmatched_rootfs.tar.bz2
|
||||
* boot0_sdcard_sun20iw1p1.bin
|
||||
* u-boot.toc1
|
||||
* disk.img with all partitions formatted
|
||||
|
||||
|
||||
```
|
||||
sudo losetup --show -f -P disk.img ## assume we will have /dev/loop1
|
||||
sudo dd if=boot0_sdcard_sun20iw1p1.bin of=/dev/loop1 bs=512 seek=16
|
||||
sudo dd if=u-boot.toc1 of=/dev/loop1 bs=512 seek=32800
|
||||
|
||||
sudo mount /dev/loop1p2 /mnt/p2
|
||||
sudo mount /dev/loop1p3 /mnt/p3
|
||||
sudo mount /dev/loop1p4 /mnt/p4
|
||||
sudo tar xpjfv ubuntu_2104_devterm_d1_EFI.tar.bz2 -C /mnt/p2
|
||||
sudo tar xpjfv ubuntu_2104_devterm_d1_boot.tar.bz2 -C /mnt/p3
|
||||
sudo tar xpjfv ubuntu-21.04-preinstalled-server-riscv64+unmatched_rootfs.tar.bz2 -C /mnt/p4
|
||||
|
||||
```
|
||||
|
||||
## Chroot part
|
||||
```
|
||||
sudo mount /dev/loop1p3 /mnt/p4/boot
|
||||
cd /mnt/p4
|
||||
|
||||
sudo mount --bind /dev dev/
|
||||
sudo mount --bind /sys sys/
|
||||
sudo mount --bind /proc proc/
|
||||
sudo mount --bind /dev/pts dev/pts
|
||||
sudo chroot .
|
||||
```
|
||||
### upgrade to devel
|
||||
now we are in chroot
|
||||
```
|
||||
touch /etc/cloud/cloud-init.disabled
|
||||
apt remove update-notifier-common
|
||||
apt-get update && apt-get purge needrestart
|
||||
```
|
||||
then edit `/etc/apt/source.list`, replace all hirsute to devel
|
||||
then
|
||||
```
|
||||
apt update
|
||||
apt-get dist-upgrade
|
||||
```
|
||||
wait a long time until upgrade done(or retry if failed,it is neccessary for having a newer xorg/mesa in riscv to display)
|
||||
|
||||
after upgrade
|
||||
```
|
||||
apt update
|
||||
apt install mesa-utils libgl1-mesa-glx libglx-mesa0 libgles2-mesa libegl-mesa0
|
||||
apt install -y xterm cmus alsamixergui qutebrowser elinks vim emacs tilde bc gnuplot dosbox chocolate-doom gimp xfig xpdf xaos x11-apps gkrellm imagemagick inkscape
|
||||
apt remove multipath-tools
|
||||
```
|
||||
|
||||
### add cpi user
|
||||
```
|
||||
useradd -m cpi
|
||||
|
||||
#add into groups
|
||||
usermod -a -G adm,dialout,cdrom,floppy,sudo,audio,dip,video,plugdev,netdev,lxd,pulse,pulse-access cpi
|
||||
```
|
||||
### Deploy the TWM window manager env.
|
||||
|
||||
The R-01 uses twm as default window manager for low resource usage
|
||||
|
||||
```
|
||||
wget https://github.com/clockworkpi/DevTerm/blob/main/Code/R01/d1_twm.tar.bz2?raw=true
|
||||
|
||||
tar xpjfv d1_twm.tar.bz2 -C /home/cpi
|
||||
|
||||
chown -R cpi:cpi /home/cpi
|
||||
|
||||
```
|
||||
|
||||
### xorg fbdev config
|
||||
rotate Xorg
|
||||
```
|
||||
ubuntu@ubuntu:~$ cat /etc/X11/xorg.conf.d/10-d1.conf
|
||||
Section "Device"
|
||||
Identifier "FBDEV"
|
||||
Driver "fbdev"
|
||||
Option "fbdev" "/dev/fb0"
|
||||
Option "Rotate" "cw"
|
||||
Option "SwapbuffersWait" "true"
|
||||
EndSection
|
||||
|
||||
Section "Screen"
|
||||
Identifier "Screen0"
|
||||
Device "FBDEV"
|
||||
DefaultDepth 24
|
||||
|
||||
Subsection "Display"
|
||||
Depth 24
|
||||
Modes "1280x480" "480x1280"
|
||||
EndSubsection
|
||||
|
||||
EndSection
|
||||
```
|
||||
|
||||
### Optmise time of boot
|
||||
```
|
||||
sudo systemctl mask apt-daily.service apt-daily-upgrade.service
|
||||
sudo systemctl disable apt-daily.service apt-daily-upgrade.service
|
||||
sudo systemctl disable apt-daily.timer apt-daily-upgrade.timer
|
||||
|
||||
sudo systemctl disable NetworkManager-wait-online.service
|
||||
sudo systemctl disable systemd-random-seed.service
|
||||
|
||||
sudo systemctl disable e2scrub_reap.service
|
||||
sudo systemctl disable systemd-networkd-wait-online.service
|
||||
|
||||
sudo systemctl disable lvm2-monitor.service
|
||||
|
||||
sudo systemctl disable snapd.seeded.service
|
||||
sudo systemctl disable pppd-dns.service
|
||||
|
||||
sudo systemctl disable avahi-daemon.service
|
||||
sudo systemctl disable ModemManager.service
|
||||
|
||||
sudo systemctl disable apport.service
|
||||
sudo systemctl mask apport.service
|
||||
sudo systemctl disable accounts-daemon.service
|
||||
sudo systemctl mask accounts-daemon.service
|
||||
sudo systemctl disable udisks2.service
|
||||
```
|
||||
|
||||
### faster login
|
||||
```
|
||||
All scripts in /etc/update-motd.d/ transferred to other place or just deleted them all
|
||||
```
|
||||
|
||||
### Install devterm related package
|
||||
```
|
||||
curl https://raw.githubusercontent.com/clockworkpi/apt/main/debian/KEY.gpg | sudo tee /etc/apt/trusted.gpg.d/clockworkpi.asc
|
||||
echo "deb https://raw.githubusercontent.com/clockworkpi/apt/main/debian/ stable main" | sudo tee /etc/apt/sources.list.d/clockworkpi.list
|
||||
|
||||
apt update
|
||||
|
||||
apt install devterm-audio-patch devterm-backlight-cpi devterm-keyboard-firmware devterm-thermal-printer devterm-thermal-printer-cups devterm-wiringpi-cpi
|
||||
```
|
||||
|
||||
## Get out chroot
|
||||
|
||||
```
|
||||
exit
|
||||
cd
|
||||
|
||||
sudo umount /mnt/p4/dev/pts
|
||||
sudo umount /mnt/p4/dev/
|
||||
sudo umount /mnt/p4/proc
|
||||
sudo umount /mnt/p4/sys
|
||||
sudo umount /mnt/p4/boot
|
||||
|
||||
sudo umount /mnt/p3
|
||||
sudo umount /mnt/p2
|
||||
sudo umount /mnt/p4
|
||||
|
||||
sudo losetup -D /dev/loop1
|
||||
|
||||
```
|
||||
|
||||
# Final part
|
||||
|
||||
now we have a chroot edited os image file disk.img in 16GB with ubuntu devel branch root fs
|
||||
|
||||
you can still use
|
||||
```
|
||||
sudo losetup --show -f -P disk.img
|
||||
sudo gparted /dev/loop1
|
||||
```
|
||||
to shrink the disk size to be like 8G or less to fit your sd card
|
||||
|
||||
then dd it into sd card
|
||||
|
||||
|
||||
# Compiling other stuff
|
||||
|
||||
## WiringPI
|
||||
```
|
||||
git clone https://github.com/clockworkpi/DevTerm.git
|
||||
wget https://github.com/WiringPi/WiringPi/archive/refs/tags/final_official_2.50.tar.gz
|
||||
tar zxvf final_official_2.50.tar.gz
|
||||
cd WiringPi-final_official_2.50/
|
||||
cp ../DevTerm/Code/patch/d1/wiringCP0329.patch .
|
||||
git apply wiringCP0329.patch
|
||||
sudo ./build
|
||||
#Choice: 2
|
||||
|
||||
```
|
||||
|
||||
# For apt upgrade
|
||||
|
||||
apt upgrade on R01 os will mess up the content of extlinux.conf
|
||||
lead the boot failed
|
||||
|
||||
so mount the sd card(with R01 os) on a PC (like Linux )
|
||||
|
||||
then go into the **boot partition** of the sd card
|
||||
|
||||
you will see
|
||||
```
|
||||
extlinux.conf
|
||||
extlinux.conf.cpi.bak
|
||||
```
|
||||
replace extlinux.conf with extlinux.conf.cpi.bak
|
||||
|
||||
the **extlinux.conf.cpi.bak** is for this kind of situation
|
||||
|
||||
# Hints
|
||||
https://forum.clockworkpi.com/t/r01-os-early-hints/8636
|
||||
@@ -1,33 +0,0 @@
|
||||
`sudo apt install ibus ibus-pinyin -y`
|
||||
```
|
||||
cat <<EOF >~/.config/autostart/ibus.desktop
|
||||
[Desktop Entry]
|
||||
Exec=ibus-daemon -drxR
|
||||
GenericName=IBus
|
||||
Name[zh_CN]=IBus
|
||||
Name=IBus
|
||||
Name[en_US]=IBus
|
||||
StartupNotify=true
|
||||
Terminal=false
|
||||
Type=Application
|
||||
EOF
|
||||
```
|
||||
|
||||
```
|
||||
sudo bash -c 'cat <<EOF >/etc/profile.d/ibus.sh
|
||||
#!/bin/bash
|
||||
|
||||
export XIM_PROGRAM=ibus
|
||||
export XIM=ibus
|
||||
export XMODIFIERS=@im=ibus
|
||||
export GTK_IM_MODULE=ibus
|
||||
export QT_IM_MODULE=ibus
|
||||
EOF'
|
||||
```
|
||||
|
||||
`sudo reboot `
|
||||
|
||||
Then right-click the ibus icon in the upper right corner of the top menu
|
||||
select preferences
|
||||
add (Add) **pinyin** input method, the default is super+space to enable the input method
|
||||
you can change the shortcut in **iBus Preferences**
|
||||
@@ -1,78 +0,0 @@
|
||||
### Orginal image download URL
|
||||
https://downloads.raspberrypi.org/raspios_full_armhf/images/raspios_full_armhf-2021-05-28/2021-05-07-raspios-buster-armhf-full.zip
|
||||
|
||||
|
||||
#### Modification request list
|
||||
- [x] screen rotation for xrandr,fbcon,lightdm
|
||||
- [x] Remove the wallpaper and change the solid color #202020
|
||||
- [x] Install all rpi-related debs in the apt source
|
||||
|
||||
#### Packages in devterm apt source
|
||||
1. devterm-audio-patch (check whether the 3.5 audio interface is plugged in, pull up a certain GPIO)
|
||||
1. devterm-fan-temp-daemon-rpi (detect the temperature of rpi, raise the io drive fan, written in python)
|
||||
1. devterm-kernel-rpi (modified kernel, 4.x series)
|
||||
1. devterm-keyboard-firmware (Devterm keyboard firmware flashing tool, Advanced users only!)
|
||||
1. devterm-thermal-printer (thermal printer program and systemd scripts)
|
||||
1. devterm-thermal-printer-cups (CUPS filter for the thermal printer, and add the thermal printer to cups, so devterm printer can be seen in chromium)
|
||||
|
||||
|
||||
|
||||
|
||||
##### Add clockworkpi to apt source list
|
||||
see https://github.com/clockworkpi/apt/tree/main/debian
|
||||
```
|
||||
wget -O - https://raw.githubusercontent.com/clockworkpi/apt/main/debian/KEY.gpg | sudo apt-key add -
|
||||
|
||||
echo "deb https://raw.githubusercontent.com/clockworkpi/apt/main/debian/ stable main" | sudo tee -a /etc/apt/sources.list.d/clockworkpi.list
|
||||
```
|
||||
|
||||
##### Config xrandr
|
||||
```
|
||||
sudo bash -c 'cat << EOF > etc/X11/Xsession.d/100custom_xrandr
|
||||
xrandr --output DSI-1 --rotate right
|
||||
EOF'
|
||||
```
|
||||
|
||||
##### Config lightdm
|
||||
in `/etc/lightdm/lightdm.conf`
|
||||
```
|
||||
greeter-setup-script=/etc/lightdm/setup.sh
|
||||
```
|
||||
*setup.sh*
|
||||
```
|
||||
#!/bin/bash
|
||||
xrandr --output DSI-1 --rotate right
|
||||
exit 0
|
||||
```
|
||||
`sudo chmod +x etc/lightdm/setup.sh`
|
||||
|
||||
|
||||
##### Modify /etc/dphys-swapfile
|
||||
```
|
||||
CONF_SWAPSIZE=512
|
||||
```
|
||||
|
||||
##### Change the default wallpaper
|
||||
The following files changed
|
||||
|
||||
* /etc/xdg/pcmanfm/LXDE-pi/desktop-items-0.conf
|
||||
* /etc/xdg/pcmanfm/LXDE-pi/desktop-items-1.conf
|
||||
* /etc/lightdm/pi-greeter.conf
|
||||
* /home/pi/.config/pcmanfm/LXDE-pi/desktop-items-0.conf
|
||||
|
||||
Delete wallpaper address `temple.jpg`
|
||||
Modify the `desktop_bg` color to `#202020`
|
||||
|
||||
|
||||
|
||||
#### config.txt
|
||||
|
||||
Add `dtparam=audio=on` to solve the problem of no sound card under HDMI
|
||||
|
||||
##### /etc/hostname to clockworkpi
|
||||
|
||||
##### /boot/cmdline.txt ,add fbcon=rotate:1, remove quiet
|
||||
|
||||
### Image download url
|
||||
https://forum.clockworkpi.com/t/devterm-os-cm3-image-files/7151/1
|
||||
|
||||
@@ -1,83 +0,0 @@
|
||||
### Img file
|
||||
|
||||
[ubuntu-21.04-preinstalled-server-armhf+raspi.img](https://cdimage.ubuntu.com/releases/21.04/release/ubuntu-21.04-preinstalled-server-armhf+raspi.img.xz)
|
||||
|
||||
### Prepare
|
||||
Edit /boot/cmdline.txt and /etc/fstab of this img
|
||||
**/boot/cmdline.txt**
|
||||
```
|
||||
console=serial0,115200 console=tty1 root=PARTUUID=78e1086a-02 rootfstype=ext4 elevator=deadline rootwait fixrtc splash fbcon=rotate:1
|
||||
```
|
||||
to use HDMI console,consider to remove **fbcon=rotate:1** in `/boot/cmdline.txt`
|
||||
|
||||
**/etc/fstab**
|
||||
```
|
||||
PARTUUID=78e1086a-02 / ext4 discard,errors=remount-ro 0 1
|
||||
PARTUUID=78e1086a-01 /boot/ vfat defaults 0 1
|
||||
```
|
||||
|
||||
### Enter chroot
|
||||
```
|
||||
sudo losetup -P /dev/loop10 ubuntu-21.04-preinstalled-server-armhf+raspi.img
|
||||
sudo mount /dev/loop10p2 /mnt/p2
|
||||
sudo mount /dev/loop10p1 /mnt/p2/boot
|
||||
cd /mnt/p2
|
||||
sudo mount --bind /dev dev/
|
||||
sudo mount --bind /sys sys/
|
||||
sudo mount --bind /proc proc/
|
||||
sudo mount --bind /dev/pts dev/pts
|
||||
|
||||
sudo chroot .
|
||||
```
|
||||
|
||||
### Inside chroot
|
||||
```
|
||||
sudo unlink /etc/resolv.conf
|
||||
echo -en "nameserver 1.1.1.1\nnameserver 8.8.8.8\n" > /etc/resolv.conf
|
||||
|
||||
sudo apt remove linux-image-raspi linux-image-5.11.0-1007-raspi -y
|
||||
sudo apt install net-tools network-manager -y
|
||||
|
||||
wget -O - https://raw.githubusercontent.com/clockworkpi/apt/main/debian/KEY.gpg | sudo apt-key add
|
||||
echo "deb https://raw.githubusercontent.com/clockworkpi/apt/main/debian/ stable main" | sudo tee -a /etc/apt/sources.list.d/clockworkpi.list
|
||||
sudo apt update && sudo apt install devterm-thermal-printer devterm-keyboard-firmware devterm-fan-temp-daemon-rpi devterm-thermal-printer-cups devterm-kernel-rpi devterm-audio-patch devterm-backlight-rpi -y
|
||||
|
||||
```
|
||||
|
||||
```
|
||||
mkdir /etc/lightdm/lightdm.conf.d/ -p
|
||||
|
||||
sudo bash -c 'cat <<EOF >/etc/lightdm/lightdm.conf.d/99-cpi.conf
|
||||
[SeatDefaults]
|
||||
|
||||
greeter-setup-script=/etc/lightdm/setup.sh
|
||||
EOF'
|
||||
|
||||
sudo bash -c 'cat <<EOF >/etc/lightdm/setup.sh
|
||||
#!/bin/bash
|
||||
xrandr --output DSI-1 --rotate right
|
||||
exit 0
|
||||
EOF'
|
||||
|
||||
sudo chmod +x /etc/lightdm/setup.sh
|
||||
|
||||
sudo bash -c 'cat << EOF > /etc/X11/Xsession.d/100custom_xrandr
|
||||
xrandr --output DSI-1 --rotate right
|
||||
EOF'
|
||||
```
|
||||
|
||||
`sudo apt-get install tasksel`
|
||||
|
||||
`sudo cp -f /lib/firmware/brcm/brcmfmac43456-sdio.raspberrypi,400.txt /lib/firmware/brcm/brcmfmac43456-sdio.txt`
|
||||
|
||||
`sudo apt install wiringpi`
|
||||
`sudo ln -s /lib/arm-linux-gnueabihf/libwiringPi.so.2 /lib/arm-linux-gnueabihf/libwiringPi.so`
|
||||
|
||||
### Outside chroot
|
||||
|
||||
dd img to sd card
|
||||
power on CM3
|
||||
config the network
|
||||
|
||||
`sudo tasksel` to select desktop env to install
|
||||
|
||||
@@ -1,19 +0,0 @@
|
||||
The GPIO on cm4 is different
|
||||
|
||||
| old | new |
|
||||
|-----|-----|
|
||||
| 28 | 18 |
|
||||
| 29 | 19 |
|
||||
| 30 | 20 |
|
||||
| 31 | 21 |
|
||||
| 32 | 14 |
|
||||
| 33 | 15 |
|
||||
| 34 | 24 |
|
||||
| 35 | 25 |
|
||||
| 36 | 26 |
|
||||
| 37 | 27 |
|
||||
| 38 | 6 |
|
||||
| 39 | 7 |
|
||||
| 40 | 16 |
|
||||
| 41 | 17 |
|
||||
| 43 | 23 |
|
||||
@@ -1,71 +0,0 @@
|
||||
# Prepare
|
||||
Before everything
|
||||
We assume that you have a Devterm with stock os running
|
||||
and a little bit of Linux compiling experience
|
||||
know how to install packages by package manager like apt
|
||||
|
||||
## WiringPi
|
||||
### CM3 or CM4
|
||||
```
|
||||
sudo apt install -y wiringpi libwiringpi-dev libcups2-dev
|
||||
```
|
||||
|
||||
### A06 A04
|
||||
```
|
||||
git clone https://github.com/clockworkpi/DevTerm.git
|
||||
cd DevTerm/Code/devterm_wiringpi_cpi/
|
||||
sudo ./build
|
||||
#chose 0 or 1 depend which board you have
|
||||
```
|
||||
|
||||
### R01
|
||||
```
|
||||
git clone https://github.com/clockworkpi/DevTerm.git
|
||||
wget https://github.com/WiringPi/WiringPi/archive/refs/tags/final_official_2.50.tar.gz
|
||||
tar zxvf final_official_2.50.tar.gz
|
||||
cd WiringPi-final_official_2.50/
|
||||
cp ../DevTerm/Code/patch/d1/wiringCP0329.patch .
|
||||
git apply wiringCP0329.patch
|
||||
sudo ./build
|
||||
#Choice: 2
|
||||
```
|
||||
|
||||
# Compile thermal printer driver code
|
||||
```
|
||||
git clone https://github.com/clockworkpi/DevTerm.git
|
||||
cd DevTerm/Code/thermal_printer
|
||||
make
|
||||
sudo systemctl stop devterm-printer
|
||||
sudo cp -rf devterm_thermal_printer.elf /usr/local/bin
|
||||
sudo systemctl start devterm-printer
|
||||
```
|
||||
## Debug or run it from manually
|
||||
1. setup socat socket for data receving for thermal printer
|
||||
```
|
||||
sudo systemctl stop devterm-printer #stop service
|
||||
sudo systemctl stop devterm-socat #stop service
|
||||
sudo socat -d -d pty,link=/tmp/DEVTERM_PRINTER_OUT,raw,echo=0 pty,link=/tmp/DEVTERM_PRINTER_IN,raw,echo=0
|
||||
sudo ./usr/local/bin/devterm_socat.sh # <- this .sh file is in DevTerm/Code/thermal_printer/usr/local/bin/
|
||||
```
|
||||
1. run devterm_thermal_printer.elf
|
||||
```
|
||||
sudo ./devterm_thermal_printer.elf
|
||||
```
|
||||
|
||||
now you can test the printer by cat or echo something into `/tmp/DEVTERM_PRINTER_IN`
|
||||
eg: `echo "hello world\n\n\n\n\n\n\n\n\n\n" > /tmp/DEVTERM_PRINTER_IN
|
||||
|
||||
we recommend use [tmux](https://github.com/tmux/tmux/wiki) to do this job
|
||||
so that you can run and see all the commands output in a single terminal window
|
||||
|
||||
## For CUPS
|
||||
just install `devterm-thermal-printer-cups`
|
||||
``` sudo apt install devterm-thermal-printer-cups```
|
||||
|
||||
this package will add a CUPS serial printer adapter,a CUPS filter for the DevTerm's thermal printer
|
||||
and will let other programs to print content through image printing using DevTerm's thermal printer
|
||||
source code is in https://github.com/clockworkpi/DevTerm/tree/main/Code/devterm_thermal_printer_cups
|
||||
|
||||
all devterm related deb packages available at
|
||||
|
||||
https://github.com/clockworkpi/apt
|
||||
@@ -1,6 +0,0 @@
|
||||
Welcome to the DevTerm wiki!
|
||||
|
||||
If you want to edit the wiki, just clone https://github.com/clockworkpi/DevTerm, and add markdown files to the **wiki** folder
|
||||
|
||||
Then Send Pull Request , once got merged, wiki will be shown at https://github.com/clockworkpi/DevTerm/wiki
|
||||
|
||||
@@ -1,26 +0,0 @@
|
||||
# cool-retro-term
|
||||
|
||||
### Install the necessary packages:
|
||||
#### CM3
|
||||
```
|
||||
sudo apt update
|
||||
sudo apt install build-essential qmlscene qt5-qmake qt5-default qtdeclarative5-dev qml-module-qtquick-controls qml-module-qtgraphicaleffects qml-module-qtquick-dialogs qml-module-qtquick-localstorage qml-module-qtquick-window2 qml-module-qt-labs-settings qml-module-qt-labs-folderlistmodel
|
||||
```
|
||||
#### ubuntu (A06)
|
||||
```
|
||||
sudo apt update
|
||||
sudo apt install build-essential qmlscene qt5-qmake qtbase5-dev qtchooser qt5-qmake qtbase5-dev-tools qtdeclarative5-dev qml-module-qtquick-controls qml-module-qtgraphicaleffects qml-module-qtquick-dialogs qml-module-qtquick-localstorage qml-module-qtquick-window2 qml-module-qt-labs-settings qml-module-qt-labs-folderlistmodel
|
||||
```
|
||||
### Compile (it takes about 30 minutes):
|
||||
```
|
||||
cd ~
|
||||
git clone --recursive https://github.com/Swordfish90/cool-retro-term.git
|
||||
cd cool-retro-term
|
||||
git reset --hard dac2b4
|
||||
qmake && make
|
||||
cp -r qmltermwidget/src/qmldir qmltermwidget/lib/kb-layouts qmltermwidget/lib/color-schemes qmltermwidget/src/QMLTermScrollbar.qml qmltermwidget/QMLTermWidget
|
||||
```
|
||||
|
||||
### Run
|
||||
|
||||
`./cool-retro-term --fullscreen`
|
||||
@@ -1,54 +0,0 @@
|
||||
## Env
|
||||
VirtualBox with ubuntu 20.04
|
||||
|
||||
## Toolchain
|
||||
|
||||
https://github.com/raspberrypi/tools/tree/master/arm-bcm2708/arm-rpi-4.9.3-linux-gnueabihf/bin
|
||||
|
||||
|
||||
## Get kernel
|
||||
1. git clone https://github.com/raspberrypi/linux.git
|
||||
1. cd linux
|
||||
1. git checkout remotes/origin/rpi-4.19.y
|
||||
1. git reset --hard cc39f1c9f82f6fe5a437836811d906c709e0661c
|
||||
1. git apply [devterm-4.19_v0.1.patch](https://raw.githubusercontent.com/clockworkpi/DevTerm/main/Code/kernel/devterm-4.19_v0.1.patch)
|
||||
|
||||
|
||||
## Compile
|
||||
```
|
||||
KERNEL=kernel7 make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- bcm2709_defconfig
|
||||
KERNEL=kernel7 make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j3
|
||||
export INSTALL_MOD_PATH=./modules
|
||||
rm -rf $INSTALL_MOD_PATH
|
||||
make modules_install
|
||||
rm $INSTALL_MOD_PATH/lib/modules/*/build
|
||||
rm $INSTALL_MOD_PATH/lib/modules/*/source
|
||||
```
|
||||
|
||||
## copy kernel to SD card
|
||||
$1 is the sd card location (mount point)
|
||||
```
|
||||
export INSTALL_MOD_PATH=./modules
|
||||
sudo cp -r $INSTALL_MOD_PATH/lib/modules $1/rootfs/lib/
|
||||
cat config_a >> $1/boot/config.txt
|
||||
cp arch/arm/boot/zImage $1/boot/kernel7.img
|
||||
cp arch/arm/boot/dts/bcm2710-rpi-cm3.dtb $1/boot/bcm2710-rpi-cm3.dtb
|
||||
cp arch/arm/boot/dts/overlays/*.dtbo $1/boot/overlays/
|
||||
```
|
||||
|
||||
## config_a
|
||||
```
|
||||
ignore_lcd=1
|
||||
dtoverlay=vc4-kms-v3d,audio=0,cma-384
|
||||
dtoverlay=devterm-pmu
|
||||
dtoverlay=devterm-panel
|
||||
dtoverlay=devterm-wifi
|
||||
dtoverlay=devterm-bt
|
||||
dtoverlay=devterm-misc
|
||||
gpio=5=op,dh
|
||||
gpio=9=op,dh
|
||||
gpio=10=ip,np
|
||||
gpio=11=op,dh
|
||||
|
||||
enable_uart=1
|
||||
```
|
||||
@@ -1,25 +0,0 @@
|
||||
usb-serial | keyboard IO number | keyboard IO register
|
||||
-- | -- | --
|
||||
3v3 | 3 | 3v3
|
||||
TXD | 16 | PA10
|
||||
RXD | 15 | PA9
|
||||
GND | 1 | GND
|
||||
|
||||
|
||||
USB | keyboard IO number | keyboard IO register
|
||||
-- | -- | --
|
||||
5v power | 5 | 5v
|
||||
GND | 22 | GND
|
||||
data + | 18 | PA12(USB_DP)
|
||||
data - | 17 | PA11(USB_DM)
|
||||
|
||||
can not have USB and usb-serial both ON
|
||||
sudo stm32flash -r devterm.kbd.0.3_48mhz.bin -S 0x08000000:65536 /dev/ttyUSB0
|
||||
srec_cat devterm.kbd.0.3_48mhz.bin -Binary -offset 0x08000000 -output devterm.kbd.0.3_48mhz.hex -Intel
|
||||
|
||||
stm32flash -w devterm_kbd.bin -v -S 0x08000000 /dev/ttyUSB0
|
||||
|
||||

|
||||
|
||||
|
||||
|
||||
@@ -1,328 +0,0 @@
|
||||
4G modem
|
||||
# Packages
|
||||
|
||||
```
|
||||
sudo apt install -y modemmmanager network-manager pppoe
|
||||
```
|
||||
|
||||
|
||||
# Power ON 4G ext(uconsole)
|
||||
```
|
||||
echo "pulling up gpio 34"
|
||||
sudo gpio mode 34 out
|
||||
sudo gpio write 34 1
|
||||
|
||||
echo "pulling up 33 to reset "
|
||||
sudo gpio mode 33 out
|
||||
sudo gpio write 33 1
|
||||
|
||||
sleep 5
|
||||
sudo gpio write 33 0
|
||||
echo "pulling back 33"
|
||||
sleep 10
|
||||
echo "done"
|
||||
|
||||
```
|
||||
## cm4 version
|
||||
```
|
||||
sudo gpio mode 24 out
|
||||
sudo gpio write 24 1
|
||||
|
||||
sudo gpio mode 15 out
|
||||
sudo gpio write 15 1
|
||||
|
||||
sleep 5
|
||||
sudo gpio write 15 0
|
||||
```
|
||||
|
||||
## devterm 4G module
|
||||
POWER 42
|
||||
RESET 43
|
||||
|
||||
# Power OFF 4G ext(uconsole)
|
||||
|
||||
```
|
||||
echo "Power off 4G module"
|
||||
sudo gpio mode 34 out
|
||||
sudo gpio write 34 0
|
||||
|
||||
sudo gpio write 34 1
|
||||
sleep 3
|
||||
sudo gpio write 34 0
|
||||
|
||||
sleep 10
|
||||
echo "Done"
|
||||
```
|
||||
|
||||
## cm4 version
|
||||
```
|
||||
echo "Power off 4G module"
|
||||
sudo gpio mode 24 out
|
||||
sudo gpio write 24 0
|
||||
|
||||
sudo gpio write 24 1
|
||||
sleep 3
|
||||
sudo gpio write 24 0
|
||||
|
||||
sleep 10
|
||||
echo "Done"
|
||||
```
|
||||
|
||||
## List modem
|
||||
```
|
||||
mmcli -L
|
||||
```
|
||||
|
||||
/org/freedesktop/ModemManager1/Modem/0 [QUALCOMM INCORPORATED] SIMCOM_SIM7600G-H
|
||||
|
||||
## Enable modem
|
||||
```
|
||||
sudo mmcli -m 0 - e
|
||||
```
|
||||
|
||||
## How to use nmcli to create a NetworkManager 4G connection
|
||||
|
||||
```
|
||||
sudo nmcli c add type gsm ifname cdc-wdm0 con-name 4GNet apn yourapn gsm.username gsmusername gsm.password gsmpassword
|
||||
```
|
||||
|
||||
replace **yourapn** and **gsmusername** with your carrier service
|
||||
|
||||
then we can see a `4GNet` in NetworkManager (like KDE's network manager UI)
|
||||
|
||||
I got the cdc-wdm0 from with **qmi_wwan** driver
|
||||
```
|
||||
mmcli -m 0 | grep "primary port"
|
||||
```
|
||||
it will be **ttyUSB2** if use **qcdm** driver
|
||||
|
||||
|
||||
Now we can use **nmtui** to connect 4GNet
|
||||
or
|
||||
```
|
||||
sudo nmcli connection up 4GNet
|
||||
sudo nmcli connection down 4GNet
|
||||
```
|
||||
if everything is right ,you will have your **ppp0** in `sudo ifconfig`
|
||||
|
||||
Here is reference arguments I've used for nmcli
|
||||
|
||||
```
|
||||
connection.id: Movistar
|
||||
connection.uuid: acab2207-347a-424c-b366-b2c4ef4e4c75
|
||||
connection.stable-id: --
|
||||
connection.type: gsm
|
||||
connection.interface-name: ttyAMA0
|
||||
connection.autoconnect: no
|
||||
connection.autoconnect-priority: 0
|
||||
connection.autoconnect-retries: -1 (default)
|
||||
connection.multi-connect: 0 (default)
|
||||
connection.auth-retries: -1
|
||||
connection.timestamp: 0
|
||||
connection.read-only: no
|
||||
connection.permissions: --
|
||||
connection.zone: --
|
||||
connection.master: --
|
||||
connection.slave-type: --
|
||||
connection.autoconnect-slaves: -1 (default)
|
||||
connection.secondaries: --
|
||||
connection.gateway-ping-timeout: 0
|
||||
connection.metered: unknown
|
||||
connection.lldp: default
|
||||
connection.mdns: -1 (default)
|
||||
connection.llmnr: -1 (default)
|
||||
ipv4.method: auto
|
||||
ipv4.dns: --
|
||||
ipv4.dns-search: --
|
||||
ipv4.dns-options: ""
|
||||
ipv4.dns-priority: 0
|
||||
ipv4.addresses: --
|
||||
ipv4.gateway: --
|
||||
ipv4.routes: --
|
||||
ipv4.route-metric: -1
|
||||
ipv4.route-table: 0 (unspec)
|
||||
ipv4.ignore-auto-routes: no
|
||||
ipv4.ignore-auto-dns: no
|
||||
ipv4.dhcp-client-id: --
|
||||
ipv4.dhcp-timeout: 0 (default)
|
||||
ipv4.dhcp-send-hostname: yes
|
||||
ipv4.dhcp-hostname: --
|
||||
ipv4.dhcp-fqdn: --
|
||||
ipv4.never-default: no
|
||||
ipv4.may-fail: yes
|
||||
ipv4.dad-timeout: -1 (default)
|
||||
ipv6.method: auto
|
||||
ipv6.dns: --
|
||||
ipv6.dns-search: --
|
||||
ipv6.dns-options: ""
|
||||
ipv6.dns-priority: 0
|
||||
ipv6.addresses: --
|
||||
ipv6.gateway: --
|
||||
ipv6.routes: --
|
||||
ipv6.route-metric: -1
|
||||
ipv6.route-table: 0 (unspec)
|
||||
ipv6.ignore-auto-routes: no
|
||||
ipv6.ignore-auto-dns: no
|
||||
ipv6.never-default: no
|
||||
ipv6.may-fail: yes
|
||||
ipv6.ip6-privacy: -1 (unknown)
|
||||
ipv6.addr-gen-mode: stable-privacy
|
||||
ipv6.dhcp-duid: --
|
||||
ipv6.dhcp-send-hostname: yes
|
||||
ipv6.dhcp-hostname: --
|
||||
ipv6.token: --
|
||||
serial.baud: 115200
|
||||
serial.bits: 8
|
||||
serial.parity: none
|
||||
serial.stopbits: 1
|
||||
serial.send-delay: 0
|
||||
ppp.noauth: yes
|
||||
ppp.refuse-eap: no
|
||||
ppp.refuse-pap: no
|
||||
ppp.refuse-chap: no
|
||||
ppp.refuse-mschap: no
|
||||
ppp.refuse-mschapv2: no
|
||||
ppp.nobsdcomp: no
|
||||
ppp.nodeflate: no
|
||||
ppp.no-vj-comp: no
|
||||
ppp.require-mppe: no
|
||||
ppp.require-mppe-128: no
|
||||
ppp.mppe-stateful: no
|
||||
ppp.crtscts: no
|
||||
ppp.baud: 115200
|
||||
ppp.mru: 0
|
||||
ppp.mtu: auto
|
||||
ppp.lcp-echo-failure: 0
|
||||
ppp.lcp-echo-interval: 0
|
||||
gsm.number: *99#
|
||||
gsm.username: --
|
||||
gsm.password: <hidden>
|
||||
gsm.password-flags: 0 (none)
|
||||
gsm.apn: internet.movistar.com.co
|
||||
gsm.network-id: --
|
||||
gsm.pin: <hidden>
|
||||
gsm.pin-flags: 0 (none)
|
||||
gsm.home-only: no
|
||||
gsm.device-id: --
|
||||
gsm.sim-id: --
|
||||
gsm.sim-operator-id: --
|
||||
gsm.mtu: auto
|
||||
proxy.method: none
|
||||
proxy.browser-only: no
|
||||
proxy.pac-url: --
|
||||
proxy.pac-script: --
|
||||
```
|
||||
|
||||
if nmcli can not start the gsm connection with errors like Ipv4 stack ,dual-stack addressing not supported by the modem
|
||||
that means we need to re-compile the kernel
|
||||
|
||||
requires all ppp driver in kernel
|
||||
**Devices drivers ->Network device support**
|
||||
and compile as *, not module
|
||||
|
||||
```
|
||||
Linux Kernel Configuration
|
||||
└─> Device Drivers
|
||||
└─> USB support
|
||||
└─> USB Wireless Device Management support
|
||||
as module
|
||||
```
|
||||
|
||||
```
|
||||
Linux Kernel Configuration
|
||||
└─> Device Drivers
|
||||
└─> Network device support
|
||||
└─> USB Network Adapters
|
||||
└─> QMI WWAN driver for Qualcomm MSM based 3G and LTE modems
|
||||
|
||||
as module
|
||||
```
|
||||
|
||||
on A06
|
||||
```
|
||||
sudo apt install pppoe
|
||||
```
|
||||
|
||||
## In order to use SIMCOM_SIM7600G-H to call or receive calls
|
||||
we have to blacklist some kernel modules
|
||||
|
||||
```
|
||||
$ cat /etc/modprobe.d/blacklist-qmi.conf
|
||||
blacklist qmi_wwan
|
||||
blacklist cdc_wdm
|
||||
```
|
||||
|
||||
```
|
||||
mmcli -m 0 --messaging-list-sms
|
||||
|
||||
mmcli -m 0 --voice-list-calls
|
||||
|
||||
mmcli -m 0 --voice-create-call='number=xxxxxxxxxxxx'
|
||||
|
||||
mmcli -m 0 --voice-list-calls
|
||||
|
||||
mmcli -m 0 --start -o 0
|
||||
|
||||
mmcli -m 0 --accept -o 1
|
||||
```
|
||||
|
||||
# Enable ModemManager debug
|
||||
change `/etc/systemd/system/dbus-org.freedesktop.ModemManager1.service`
|
||||
add --debug after `/usr/sbin/ModemManager`
|
||||
```bash
|
||||
...
|
||||
[Service]
|
||||
Type=dbus
|
||||
BusName=org.freedesktop.ModemManager1
|
||||
ExecStart=/usr/sbin/ModemManager --debug
|
||||
StandardError=null
|
||||
Restart=on-abort
|
||||
...
|
||||
```
|
||||
Then
|
||||
|
||||
```
|
||||
sudo systemctl daemon-reload
|
||||
sudo systemctl restart ModemManager.service
|
||||
```
|
||||
|
||||
## show audio levels
|
||||
```
|
||||
sudo mmcli -m 0 --command "AT+CLVL=?"
|
||||
response: '+CLVL: (0-5)'
|
||||
```
|
||||
## show current levels
|
||||
```
|
||||
sudo mmcli -m 0 --command "AT+CLVL?"
|
||||
response: '+CLVL: 4'
|
||||
```
|
||||
```
|
||||
sudo mmcli -m 0 --command "AT+CLVL=5"
|
||||
response: ''
|
||||
```
|
||||
```
|
||||
sudo mmcli -m 0 --command "AT+CLVL=10"
|
||||
error: command failed: 'GDBus.Error:org.freedesktop.ModemManager1.Error.MobileEquipment.Unknown: Unknown error'
|
||||
```
|
||||
|
||||
## mute mic
|
||||
```
|
||||
sudo mmcli -m 0 --command "AT+CMUT=?"
|
||||
response: '+CMUT: (0-1)'
|
||||
```
|
||||
```
|
||||
sudo mmcli -m 0 --command "AT+CMUT?"
|
||||
response: '+CMUT: 0'
|
||||
```
|
||||
```
|
||||
Mute (but may need to be used during a call)
|
||||
sudo mmcli -m 0 --command "AT+CMUT=1"
|
||||
```
|
||||
|
||||
no ring volume
|
||||
|
||||
## Test signal
|
||||
```
|
||||
sudo mmcli -m any --signal-setup=10 # 10secs to refresh
|
||||
sudo mmcli -m any # to see signal quality
|
||||
```
|
||||
Reference in New Issue
Block a user